
ロボットのためのポジショニング
人間に何らかのサービスを提供するロボットの多くは「移動」を伴い,そのベースとなるナビゲーション技術・ポジショニング技術はロボティクスにおける最も重要な技術の一つと言われています.それら技術を支えるインフラとして,屋外ではGPSを中心とした衛星測位がデファクトスタンダード(事実上の標準)となっていますが,屋内においては,様々な手法が提案されているものの未だ決め手がありません.ここで,もし屋内でGPS互換の測位技術が使用できれば,単一の受信機により屋内外をシームレスに測位することが可能となり,デバイスのコスト削減や利便性の向上に繋がります.本プロジェクトでは,屋内GPS技術として「インドア・メッセージング・システム(IMES)」と「スードライト(擬似衛星)」に着目し,それらをロボットに応用する研究を行なっています.
![]() ドップラー測位手法による高精度IMES (2010年~)
ドップラー測位手法による高精度IMES (2010年~)
本研究は(株)日立産機システムとの共同研究です.
図1:ドップラー測位概念図
インドア・メッセージング・システム(IMES)は宇宙航空研究開発機構(JAXA)が人間へのサービス用途に開発した屋内GPS技術です.IMESはGPSと同等の信号を用いたアクティブRFIDタグであり,地下街や建物の中など,GPSの電波が届かない屋内に通常10m程度の間隔で設置し,受信端末がどの送信機の近傍にあるかを判定することにより測位を行う簡易なデバイスです.屋外のGPSと異なり三辺測量を行わないため,精度は送信機の設置間隔(10m程度)と等しくなります.これは人間へのサービス(例えば,位置を伴う緊急通報や,位置に基づく広告など)には問題のない精度ですが,ロボットの制御に使用する場合,最低でも数10cmの精度が必要となるため,そのまま用いることはできません.そこで本研究では,IMESを高精度化する手法として,「ドップラー測位手法」を提案しました(図1).本手法では,受信機のアンテナを動かす(回転させる)ことで得られる搬送波のドップラー変化,可動アンテナの局所座標系における位置,および姿勢センサから得られる絶対姿勢情報を用いて観測方程式を立て,それらを最小二乗法やカルマンフィルタなどで解くことで位置を算出します.
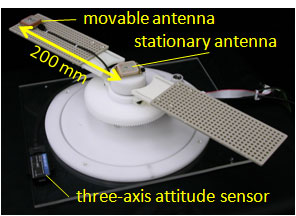
図2:ドップラー計測装置
図2に本研究で開発したドップラー計測装置を示します.本装置は,本体に取り付けられたバーを360°時計回り/反時計回りに回転させることでドップラー変化を生成します.また,ドップラーを取得する受信機には,NovAtel社のSuperStarIIをIMES用に改良し使用しています.本装置をロボットに搭載し実験を行った結果,姿勢センサの方位成分の誤差(磁気コンパス誤差)がゼロという仮定の下で,数cm~数10cmの測位精度を達成しました.現在は,その他センサとのインテグレーションや,ロボットナビゲーションへの応用に取り組んでいます.
![]() スードライト (2005年~2009年)
スードライト (2005年~2009年)
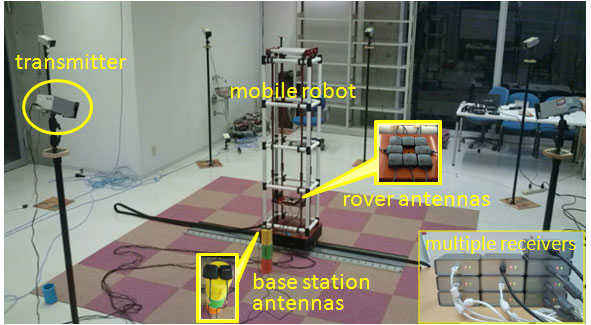
図3:スードライト実験風景
スードライト(擬似衛星)は地上設置型のGPS送信機です.その歴史は古く,もともとはGPS衛星の地上でのテストに使用されていました.GPS同様に複数の送信機を用いて三辺測量を行うため,搬送波を測位に用いれば数cmレベルでの測位が可能となります.本研究では,早稲田大学WABOT-HOUSE研究所に日本初の常設型スードライトシステムを設置し,実験を行って来ました.実験の結果,搬送波を用いたcmレベルの測位(デッドレコニング)を実現しました.