
Positioning for robots
Positioning and navigation technology is a very important technology in the field of robotics. GPS is the de facto standard as an outdoor positioning infrastructure, but there is no prominent method for indoor positioning, although a lot of methods have been proposed. If positioning technology that is compatible with GPS can also be used in indoor environments, it will enable seamless indoor-outdoor positioning with a single receiver. This will reduce the cost of the device and make using it more convenient. In this project, we are investigating an indoor messaging system (IMES) and pseudolites as GPS-compatible indoor positioning techniques, and are conducting research on their application to robot navigation.
![]() High-accuracy IMES with Doppler positioning (2010 -)
High-accuracy IMES with Doppler positioning (2010 -)
This research is a collaborative work with Hitachi Industrial Equipment Systems Co., Ltd.
Fig. 1: Overview of Doppler positioning
The concept of indoor messaging system (IMES) was devised by Japan Aerospace Exploration Agency (JAXA) for location-based services. An IMES is composed of simple transmitters that transmit the position information assigned to each transmitter by modulating it on a GPS-compatible signal. However, unlike GPS, a receiver of IMES does not use trilateration to determine its position; instead, it simply decodes the position information (namely, the transmitter's position) from the incoming signal and regards it as the receiver's position. Accordingly, the positioning accuracy equals the installation interval of transmitters (normally 10 to 20 m). This accuracy is sufficient for services for humans, but for robot navigation, at least decimeter-level positioning accuracy is necessary.
We have proposed a “Doppler positioning method” in our project to achieve high-accuracy IMES localization (Fig. 1). Doppler shifts of a carrier wave (produced by moving a receiver antenna) and the three-axis attitude of the receiver are used to derive observation equations; we then solve the equations using a least squares method or a Kalman filter to determine the receiver's position.
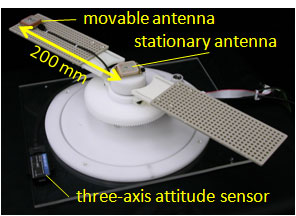
Fig. 2: Doppler measurement unit
A Doppler measurement unit we developed is shown in Fig. 2. The unit generates Doppler shifts by rotating the bar mounted on it 360 degrees clockwise or counter-clockwise. The receiver modules are the SuperStar II from NovAtel Inc., which are used with firmware modification for IMES. In an experiment in which the Doppler measurement unit was mounted on a robot, centimeter- to decimeter-level positioning accuracy was achieved under the assumption that the velocity error of the robot and the azimuth error of the attitude sensor (magnetic compass) were both zero. We are currently conducting experiments on applying the proposed method to robot navigation.
![]() Pseudolites (2005 - 2009)
Pseudolites (2005 - 2009)
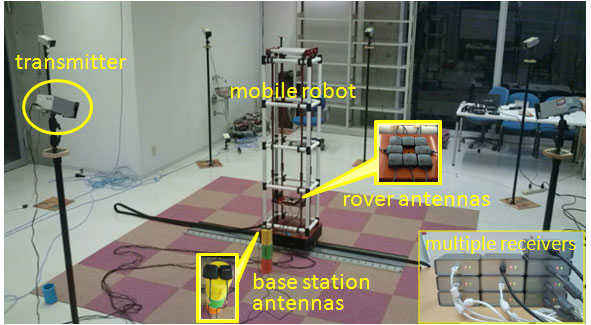
Fig. 3: Image of pseudolite experiment
Pseudolites are ground-based GPS transmitters. Originally they were used for testing GPS satellites on the ground. Since pseudolites use trilateration with multiple transmitters in the same manner as GPS, centimeter-level positioning is possible if the carrier wave is used for positioning. We conducted a pseudolite experiment at the WABOT-HOUSE Laboratory in Gifu Prefecture. The experimental results indicated that centimeter-level positioning (dead-reckoning) was achieved.