
ロボットのための認知・学習メカニズム
複雑な環境の中で動くロボットにおいては,自らの経験に基づいて学習することは非常に重要な能力です.本プロジェクトではロボットが持つセンサからの入力やモータへの指令情報を学習することにより,様々な認知的能力を獲得するしくみを開発することを目指して研究を行っています.
![]() 力学系アトラクタとしての物体操作スキルの学習 (2005年~)
力学系アトラクタとしての物体操作スキルの学習 (2005年~)
本研究は独立行政法人理化学研究所との共同研究です.
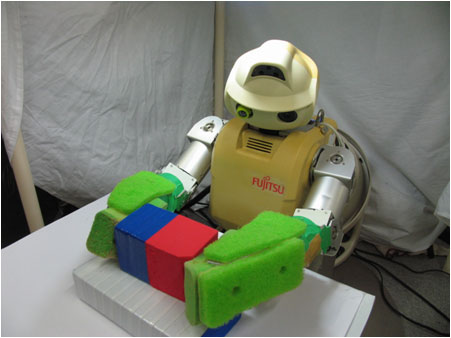
ロボットが外界の情報に基づいて判断して,適切な運動を生成するのに必要となる情報処理システムとして,力学系アトラクタを用いた新しい方法を研究しています. これまでに広く用いられている方法では,判断機構で「コップ/お皿」を「つかむ/置く」といった記号的なものを用いて運動計画をした後に,それぞれの運動を実現する制御方法を使うという方法がとられてきました.私たちはこのような記号的なものを設計するときに与えるのではなく,ロボットが同じ作業を繰り返し学習する中で,連続的なセンサ情報の変化から力学系アトラクタを構成し,記号的な概念を獲得してゆく枠組みを作ることを目指しています.
![]() 運動制御システムの発達的学習 (2005年~2008年)
運動制御システムの発達的学習 (2005年~2008年)
本研究は独立行政法人理化学研究所との共同研究です.
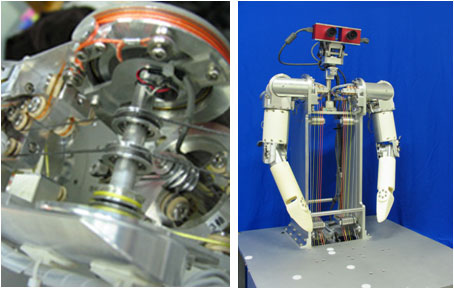
私たちは新しい動作を覚えるとき,最初はぎこちなく動いていますが, だんだんと滑らかに動けるようになります.このように繰り返し運動を行うことにより その運動スキルを獲得してゆく過程を,脳科学の知見を参考にモデル化し, ロボットを使って実験を行っています.
この実験を行うために私たちはワイヤ拮抗駆動型のロボットアームを開発しました. このロボットアームの関節は拮抗する2本のワイヤによって駆動されていて, 駆動モータは胴体下部に収められています.またワイヤ駆動系にばねを入れて柔軟性を 持たせており,これらの工夫によってロボットアームの重量を減らすことができ, ロボットが動いているときに環境と衝突しても破壊しないようになっています.