
カスタマイズ可能なコミュニケーションロボットWEAR
我々は近年,次第に複雑化し知能化され,いわば「ロボット化」されていく機械システムにおいて,「ユーザとの愛着の形成」を有利にするためのメカニズムの開発を目的としています.
近年の機械システムは複雑化,多機能化の一途を辿っており,一般のユーザにとっては使うことは稀であるような機能が多数盛り込まれています. このため機械システムの知能化も顕著で,ユーザのうかがい知れぬところで機械がひとりでに環境を解釈し,機械自身の設定を変更するような機能が盛り込まれ始めています.これはいわば「機械の総ロボット化」に他ならないと考えられます. このような現代において我々は,これまで長期間にわたる菅野研究室での知能機械についての研究成果から,これからの機械システムが盛り込まなければいけない機能は「ユーザとの愛着形成機能」に他ならないと考えました.
ユーザとの愛着形成によって,機械システムには「機械とユーザとのインタラクションの増進」,「ユーザの創造性の刺激」,「機械のエラーへのユーザの柔軟化」,「機械のライフタイムの長期化」などが望めると考えております.
![]() 開発コンセプト―インタラクションの双方向性とカスタマイズ―
開発コンセプト―インタラクションの双方向性とカスタマイズ―
我々は機械と人間の対話(インタラクション)を設計するときに,その双方向性が重要であると考えました.そこで,機械を目的や好みに合わせてカスタマイズしていく際にも,機械と人間の双方向の対話が実現されることが,愛着の形成に重要であると考えました.
機械への愛着形成に関して我々は,「双方向性」と「カスタマイズ性」について着目しています.
まず双方向性とは機械側がユーザからの何らかの働きかけに対して応答することです. この応答は一つの入力に対して1つの出力を出すような単純なものであってはなりません. 時にはユーザの意図と反することがあるような多様性がありながら,後に総じて考えた場合にユーザに対する説得力がある出力,つまり「ああ,そういうことか」と思わせるような出力が必要です. これによって,ユーザに機械が感情や意思を持っているかの如く思わせる効果があると考えられます. ロボットと呼ばれる多自由度の知能機械は,このような感情や意思を持っている「ふり」がとても得意な機械です.
次にカスタマイズ性とは,機械の動作や外観をユーザの目的や好みに合わせて改変してくことです. これによってユーザは「ユーザ独自の」機械を作ることができます.誰でも自分が作ったものに対しては強い愛着を抱くものです.
ここで我々はカスタマイズという動作に着目しました. これまでの機械においてカスタマイズとはユーザ側のロボットに対する自己イメージ(理想像など)の反映に過ぎず,カスタマイズする時点では一方通行で,対象となる機械から反応が得られるのは機械がタスクを実行するタイミングでした. しかし,意識を持った「ふりをする」ロボットが,ユーザから一方的にイメージを押し付けられて良い物でしょうか.
我々はカスタマイズしている時点で,ロボット自身が自己イメージを持ち,ユーザからのカスタマイズに対して直ちにリアクションを起こすようなモデルこそが,次世代の機械システムと人間とのインタラクションであり,そこに愛着が生まれるのではないか,と考えました.
ユーザによるカスタマイズに対してロボットが取り得るリアクションとしては,カスタマイズの拒否がもっとも直接的で強い主張形態であるといえるでしょう. 強すぎる主張はユーザに不快感を与えかねませんが,ユーザに対して,ロボット自身の主体性を感じさせるためには必要な行為かもしれません.
![]() 開発した実機―Waseda Extendable ARchitecture (WEAR)―
開発した実機―Waseda Extendable ARchitecture (WEAR)―
我々はカスタマイズを通したユーザ・ロボット間の双方向的かつ物理的交流を実現するために,ロボット自身がカスタマイズされた身体を評価し,それに基づいてカスタマイズの拒否および受諾を決定し,それを表出することができるロボットWEAR(Waseda Extendable ARchitecture)を開発しました.
要求仕様
カスタマイズにおける双方向性を実現するために,ロボットにはまず,以下の基本的な要求仕様が考えられます.
- ユーザ(被験者)がカスタマイズ可能である
- カスタマイズをロボットが認識できる
- カスタマイズをロボットが拒否できる
まず基本的な前提としてユーザ(被験者)がロボットをカスタマイズできる実験プラットフォームが必要です.実験を現実的な時間内で終了させるためには,カスタマイズの自由度を若干犠牲にしても,簡単にカスタマイズが可能であるということが重要であるといえるでしょう.
つぎにカスタマイズされた身体を評価できるためにはロボット自身がカスタマイズされた自身の身体を認識できることが重要です.これは近年のPCが備えているPCIバスやUSBバスのようなプラグアンドプレイが可能な電気的ハード+ソフトウェアが必要であることを示しています.
最後にロボットがカスタマイズを拒否できることが重要です.カスタマイズを拒否する行為は,ユーザ(被験者)によって付加された身体を拒否して,強制的に排出する機能と,ユーザ(被験者)による身体パーツの除去を拒否して保持する機能の両方が必要だといえます.
カスタマイズポート
これらの仕様を実現するために,ユニバーサルカスタマイズポートを開発しました.
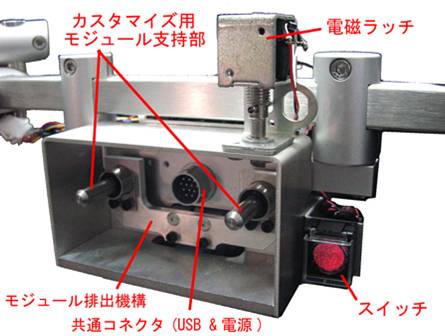
カスタマイズポートは,カスタマイズ用モジュールを支持するために堅牢なつくりになっております. カスタマイズを認識するハードウェアはPCのためのUSBを流用しました. モジュール排出機構はポート背面に備え付けられたサーボモータによって取り付けられたモジュールを押し出す機構であり,ユーザ(被験者)による引抜を拒否するための保持機構として電磁ラッチを備えております. ユーザ(被験者)が排出を命令するためのスイッチも備えております.
スタマイズ可能なコミュニケーションロボットWEAR本体
このカスタマイズポートを複数搭載し,基本的な移動機構として前方向移動台車を備えたロボットWEAR(Waseda Extendable ARchitecture)を構築した図を以下に示します. WEARは正八角柱の外観をしており,高さ800[mm],幅800[mm],重量は約76[kg]です. 八角柱の各側面に各4つのカスタマイズポート,計32個のカスタマイズポートを有しており,底部には全方向移動台車を装備しております. 上面には半球状のドームが見えますが,これはユーザ(被験者)を認識するための人体感知センサ(焦電型赤外線センサ)を搭載しております. WEAR本体は,我々の研究の視点から考え,ユーザ(被験者)がWEARとのインタラクションの最中に遊び方が創出される過程を観察するために,一見してインタラクションの仕方,つまりこのロボットとの遊び方をイメージさせるようなデザインを排除するように設計しました.

カスタマイズ用モジュール群
次にユーザ(被験者)がカスタマイズに用いるモジュールの開発を行いました.カスタマイズ用モジュールに要求されるのは,ユーザ(被験者)の五感に訴えかけるものであること.そしてWEAR本体を設計したときとは逆に,ユーザ(被験者)がカスタマイズの効果を一見して想像しやすいことです.
| 区分 | 視覚 | 触覚 | 聴覚 | その他 |
|---|---|---|---|---|
| ロボットからの出力 |  フルカラーLED |
 アーム |
 スピーカ |
― |
| ロボットへの入力 | カメラ(開発中) |  接触スイッチ |
マイクロフォン (開発中) |
 超音波距離センサ |
カスタマイズの例
ユーザ(被験者)のカスタマイズによって,WEARは入力/出力のバリエーションを増やし,行動を次第に複雑化させていくことが出来ます.

![]() 今後の展望―行動アルゴリズムの開発と評価―
今後の展望―行動アルゴリズムの開発と評価―
WEARによる研究はまだ始まったばかりです.ユーザによるカスタマイズをロボット自身が評価するためには,ロボット自身に「価値観」が形成されていなくてはなりません.また各モジュールからの入力に対して出力する行動をどうするかなど,より詳細に吟味していく必要があるでしょう.