
最適な機械動作の計画・実行
ロボットに代表される機械が,物理法則に支配された身体の特徴を最大限に生かして最適な動作を行うためには,動作を記述する運動モデル(例えば運動方程式)から最適動作を導くという非線形最適化問題を解く必要があります.しかしこの問題は数学的には非常に難しく,解が得られる目処がありません.しかし近年のコンピュータ技術の発達により,近似計算というアプローチでこの問題が解けるようになってきました.そこで我々は多くの機械に対応した最適動作計算・実行システムを構成するために理論と応用の両面から研究を進めています.我々の最新のシステムは従来比で3000倍程度高速に動作を計算できるようになり,3~4自由度の機械に対する準最適動作を数秒から数分で計算することができました.時間をかければ6自由度程度の機械についても計算ができ,計算速度,精度共に世界一だと言えます.当グループではこのプロジェクトの他に,リズムを介した人間機械間インタラクションも扱っています.
![]() 最適動作計算ソルバ (2010年~)
最適動作計算ソルバ (2010年~)
本研究の一部はホンダ・リサーチ・インスティチュート・ジャパン(HRI-JP)との共同研究です.
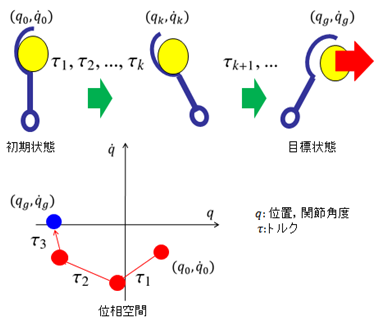
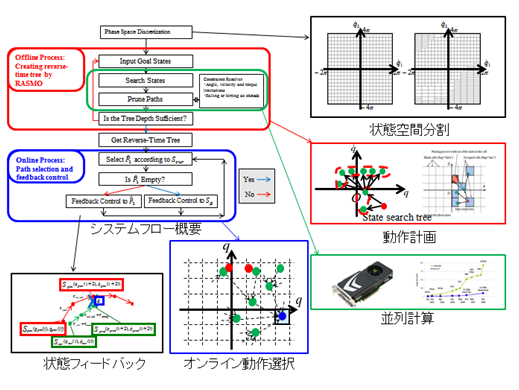
機械が持つ運動状態は位置(関節角度を含む)と速度(関節角速度を含む)で記述できます.位置と速度が同じであれば機械状態も等しいので,機械の動作は位置と速度の軸を持つ位相空間上に一本の線として描くことができます.本研究では,この位相空間上において機械の初期状態から目標状態までを結ぶ最適動作(経路)の計算を扱っています.この最適動作は具体的には最短時間動作やエネルギー最小動作などです.我々が構成した最適動作計算ソルバは下図のフローに従って計算を実行します.状態空間分割部では状態空間をいくつものセルに分割し,似た機械状態の検索を高速化します.動作計画部では状態空間全体に均等な探索を行うとともに,最適性の低い動作を切り捨てる枝刈りという計算を行います.これらのプロセスは並列計算機GPUに実装されており,1024基の計算コアで同時に計算ができます.動作計画部が終わると,ソルバが計算した準最適動作がデータベースに蓄えられ,次は実際の機械制御に移ります.オンライン動作選択部では外乱によって乱されたそれぞれの機械状態から,目標状態までの適切な動作をデータベースから検索し,常に準最適動作を保証します.状態フィードバック部ではオンライン動作選択部が探した準最適動作を実現するための微細な制御を行います.
三平研(東工大)と実験を行った投球運動
本ソルバを用いることで約65km/h というベストレコードを達成しました(従来は約50km/h).
→リンク(準備中)
6自由度倒立振子
6つの直列した振り子を小さな力だけで振り上げる動作について,準最短時間動作の計算に成功しました.
→リンク(準備中)
![]() リズムを介した人間機械間インタラクション(2009年~)
リズムを介した人間機械間インタラクション(2009年~)
本研究はホンダ・リサーチ・インスティチュート・ジャパン(HRI-JP)との共同研究です.
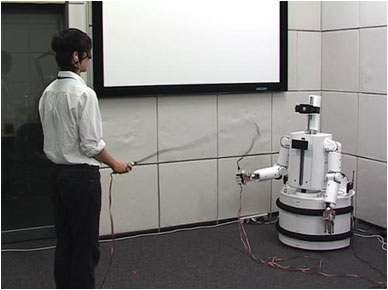
人間とロボットの間で協調作業を行うためにはリズムの共有が欠かせません.しかしながら一般的な協調場面において,人間がどのようなリズムに着目をするのか,またはロボットがどのようなリズムを提示するべきなのかについては研究が進んでおらず,協調作業を困難なものとしています.そこで我々は大縄回しのタスクを例に,リズム伝達に関わる情報の流れについての研究を行なっています.大縄回しを行う際には力覚,視覚,聴覚といった多くのモダリティに関わるリズムが生じます.人間はこれらのリズムの中からどのように縄を回すリズムを選択しているのか,さらに,ロボットはどのようなリズムを提示すればうまく協調が行えるのかについて,工学的・心理学的観点から調査を進めています.