
情緒交流ロボットWAMOEBA
―ロボットに心は生まれるのか
この壮大なテーマに対して,我々は,心を「知 (intelligence) ・情 (emotion, feeling) ・意 (mind, willingness) 」の3つの機能に分類し,特に「情」の側面からのアプローチに着目して研究を行ってきました.数々の思考実験や生物とロボットとのアナロジーを考える中で生まれたのが,WAMOEBA (ワメーバ,Waseda Artificial Mind On Emotion BASE, 早稲田のアメーバ) です.
![]() 自己保存評価関数とホルモンパラメータ (WAMOEBA-2 1998年~)
自己保存評価関数とホルモンパラメータ (WAMOEBA-2 1998年~)
我々はWAMOEBAに,生物を用いた検証や内省によって確率された人間の心理モデルを導入するのではなく,ロボット自身の身体に即した情動表出の創発を期待し,生物の基本的な行動原則である「自己保存の法則」を導入しました.ここで言う情動表出とは,緊張したときに顔を赤らめたり,脂汗をかいたり,猫が天敵に遭遇した際に身の毛を逆立てて警戒するような情動的表現行動です.
情動表出ロボット「WAMOEBA-2」
ロボット自身の自己保存の原則を導入するために,WAMOEBA-2にはロボット自身の内部状態を計測するための下記のセンサを搭載しました.
- バッテリ電圧(残量)
- バッテリ電流
- 回路温度
- モータ温度
また,自己保存を促進するための自由度として,移動やカメラ操作に加えて,放熱ファンを搭載しました.
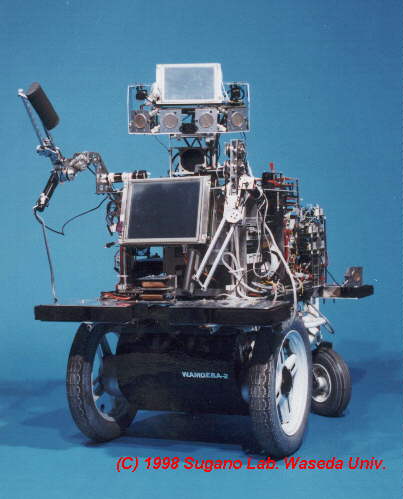
図1.WAMOEBA-2
自己保存評価関数
自己保存状態を計測するためのセンサごとに,「ロボット自身の自己保存」という原則に従って評価を行う「自己保存評価関数 (self-preservation function) 」を定義しました.自己保存評価関数は,各センサの絶対値と一次微分値を入力とし,出力として「自己保存評価値 (self-preservation value) 」と呼ばれる無次元の正規化された値を出力するファジィメンバシップ関数 (fuzzy membership function) です.この値が大きいほど,自己保存状態が悪い,危険な状態であると定義します.
バッテリ電圧を例とします.満充電に近い電圧値であれば,自己保存評価値は小さくなりますが,PCの最低動作電圧に近い場合は自己保存評価値が急激に上昇します.また,満充電時の電圧よりも高い電圧を示せば,過充電であるとして評価値が高くなるように定義しました.
すべてのセンサ入力に対する自己保存評価値を統合する際には,自己保存評価値中で最大の値を選択し,それをロボット自体の自己保存評価値とします.
ホルモンパラメータ
ロボットの身体を使って情動表現を行うために,我々は「ホルモンパラメータ (hormone parameter) 」を定義しました.ホルモンパラメータは,生物の内分泌系を模倣した各部の制御に影響する媒介変数で,自己保存評価値の絶対値と微分値を使って定義しています.
WAMOEBA-2のホルモンパラメータは全部で4つのパラメータを持ち,自己保存評価値の上昇・下降および絶対値によって,分泌され,時間とともに現象(分解)されていきます.これらをそれぞれ「R-エンドルフィン (R-endorphin)」「R-アドレナリン (R-adrenalin) 」「R-ノルアドレナリン (R-noradrenalin) 」「R-ドーパミン (R-dopamine) 」と名付けました.そして,これらの量に従って,各部の自由度の制御パラメータを変化することとしました.
たとえば,R-エンドルフィンの量が大きい場合は,ロボットの発話時のピッチが高くなることや,R-アドレナリンが分泌された場合は,放熱ファンの回転数が上昇することなどです.
WAMOEBA-2の情動表出
自己保存評価関数とホルモンパラメータの仕組みによって,WAMOEBAにはロボット自身の身体に即した情動表出が可能となりました.例えば,探索行動中にモータの温度が上昇した場合は,運動機能を抑制して,冷却ファンに余剰電流を回します.これによって,観察者にはWAMOEBAが疲れて,人や動物に例えるなら汗をかいているようにも見えるかもしれません.
このように,WAMOEBAプロジェクトでは,設計者の主観によって具体的に切り分けられた感情パラメータを用いなくとも,身体に即した動作によって情動表出が可能であることを示しました.
![]() 対話型進化的計算による適応的インタラクション (WAMOEBA-3 2002年~)
対話型進化的計算による適応的インタラクション (WAMOEBA-3 2002年~)

図2.WAMOEBA-3
WAMOEBAプロジェクトでは,ロボットの身体情報に即した,ロボット自身の感情表現をテーマに研究を行ってきましたが,その動作パラメータは設計者によるトライ&エラーによって設定されたものでした.
これに対して,ロボットの身体および,コミュニケーションを行う人間も含めた環境に適したパラメータを導出する方法として,対話型進化的計算 (interactive evolutionary computation, IEC) を導入しました.対話型進化的計算とは,遺伝的アルゴリズム (genetic algorithm) に代表される進化的な計算手法のうち,評価関数 (fitness function) に人間の主観的評価を用いたものを指します.
本研究では,WAMOEBA-3をプラットフォームとして,ロボットの行動に関わるパラメータを遺伝子にコーディングし,それぞれ異なる沢山の遺伝子に書かれたパラメータを使って,ロボットを動かし,それの動きに対して評価を行う実験を行いました.
適応的インタラクションの問題点
対話型進化的計算を用いた適応的インタラクションによって,学習初期の数時間においては評価値が上昇することが分かりましたが,中期以降は評価値が低下することが分かりました.これは,評価者の肉体的疲労や精神的な疲労による飽き,そしてそれによる評価軸の転換によって既存の好適な遺伝子が低い評価を受けることが確認されました.
ハイブリッド評価による評価者の疲労低減
進化的計算において,動的に変化する評価に対応するには,遺伝子プール内の多様性を保つことが良いとされています.遺伝子プール内の多様性を保つには,個体数を大きくするか,突然変異率を高くすることが考えられます.しかし,対話型進化的計算においては,個体数を大きくすると評価者の評価回数が増加して評価者の肉体的疲労が増加します.また,突然変異率を高くすると学習収束率が低くなるため,被験者の飽きを併発する可能性があります.
これに対して,本研究では,遺伝子を自己組織化マップ (self-organizing map) によって分析し,弁別を行うことに寄って,類似した遺伝子の評価を抑制して評価者の疲労度を抑えつつ,遺伝子プール内の個体数を大きくすることで,実験中盤での高い評価値のキープに成功しました.