インフラ班
研究テーマ
インフラをメンテナンスするロボットシステムの開発
研究概要
インフラ班では、水道管やガス管といった配管インフラに対し、管内および管外の両面から点検や修復を行うロボットシステムの開発に取り組んでいます。配管内部で作業を行うロボットは、限られた空間を走破しながら段差や曲がりを乗り越える必要があるため、コンパクトでありながら多機能な機構設計が求められます。また、配管内には大型の制御装置を設置できないことから、遠隔操作や分散処理に対応した専用の制御システムを構築する必要があります。一方、配管外からの点検・作業は高所や入り組んだ場所で行う必要があるため、ドローンなど三次元移動が可能な空間移動型ロボットを用いています。高所や複雑な構造物へのアクセスを可能にし、さらに視覚−慣性センサによる自己位置推定と非線形ロバスト制御により、精密かつ柔軟な作業を実現しています。将来的には、こうしたロボットを活用し、インフラの維持管理を無人かつ自律的に行える社会の実現を目指しています。

ケーブル伝動ロボット
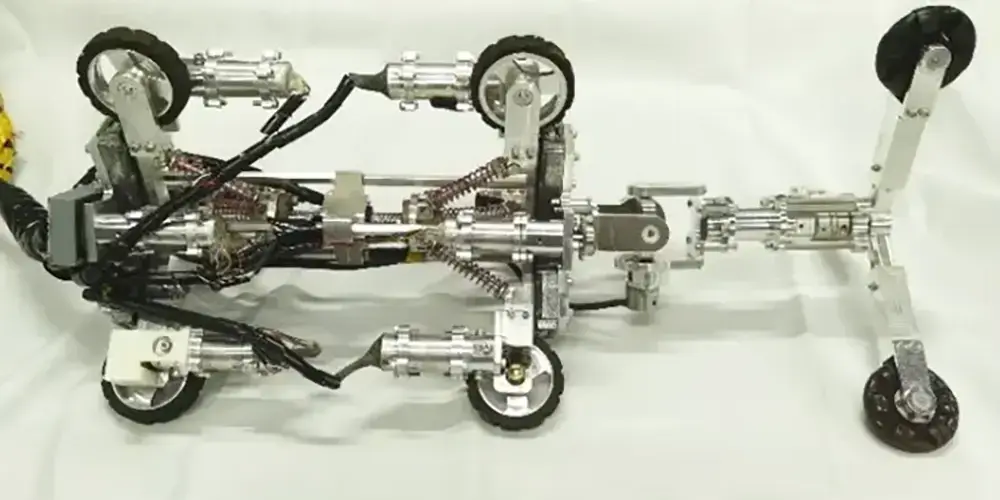
水道検査ロボット
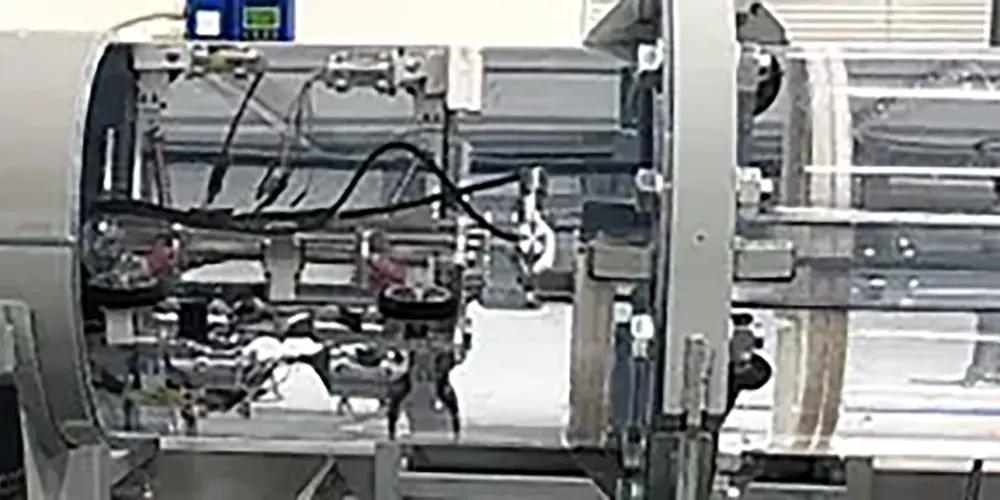
水道検査ロボット(段差走破)
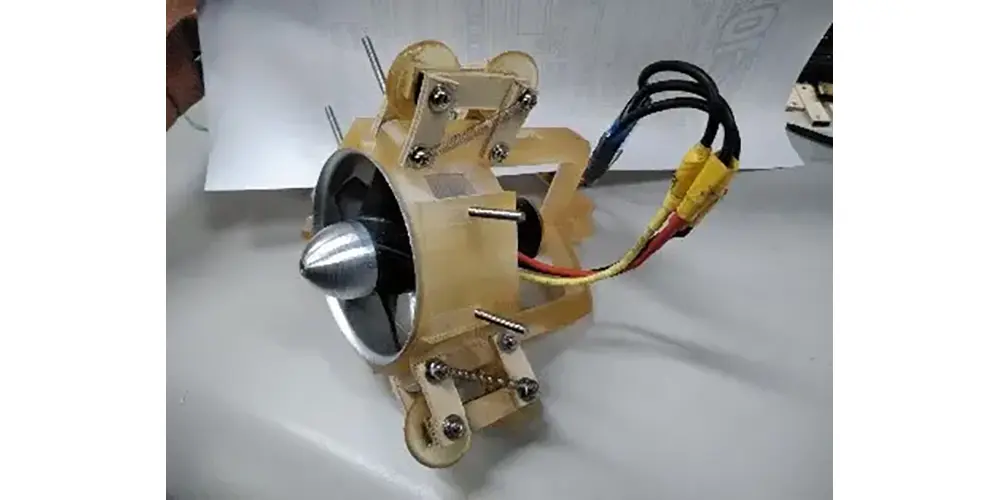
ダクテッドファン型管内走行ロボット
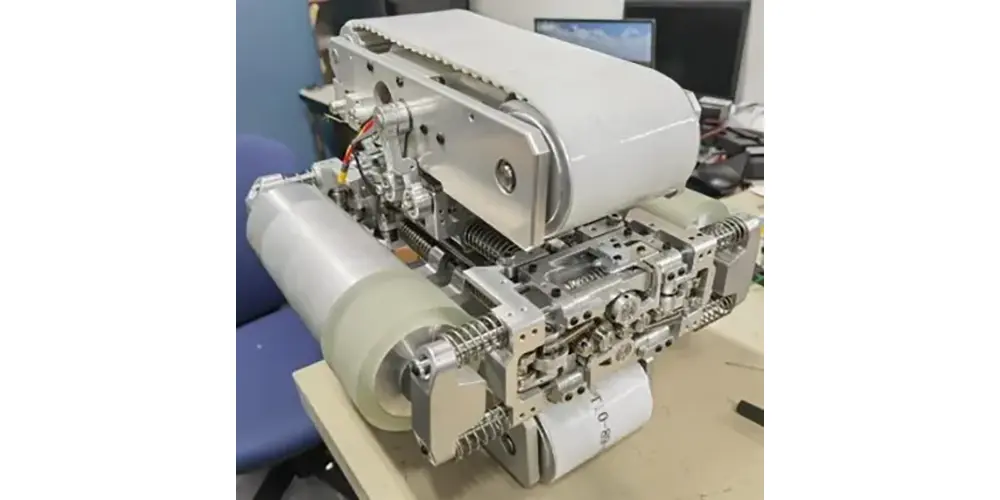
マルチモード切替管内走行ロボット

ガス管検査ロボット

成果・発表(学会発表・論文等)
国際学会
- Ezeldin N. Moustafa, Mitsuhiro Kamezaki, Ahmed Khalifa, Shota Miyake, Tamon Miyake, and Shigeki Sugano, “Development of a Two-DoF Three-Parallelogram Aerial Manipulator for Pipeline Crack Repair Using a Two-Tool End-Effector and Onboard Sensor-Based Localization,” Proceedings of 2025 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. xx–yy, 2025. (Accepted in May 2025)
- Shota Miyake, Kento Yoshida, Shigeki Sugano, Mitsuhiro Kamezaki, Preliminary design and evaluation of a ducted-fan type pipeline robot, ROBOMECH Journal, vol. 11, number 17, Dec. 2024
- Wenbo Zheng, Xinheng Jiang, Mitsuhiro. Kamezaki, Chenyu Tai, Peizhi Zhang, Tamon Miyake, Shota Miyake, Xiaomeng Liu, Yasuo Nakatsuka, Shigeki Sugano, “Prototype design of a multi-mode switching module with locking mechanism for water-proof pipeline inspection robots,” in Proceedings of the IEEE/SICE International Symposium on System Integration (SII), pp. 741-746, 2024.
国内学会
- 小池俊宇, 三宅章太, 鄭文搏, 三宅太文, ムスタファエゼルディン, 戴振羽, 菅野重樹, 亀﨑允啓, 小径ガス管検査ロボットシステムの開発, 早稲田オープン・イノベーション・フォーラム2024(WOI’2024), 2024年11月
- 鄭文搏, 三宅章太, 馮伝鑫, 三宅太文, 小池俊宇, 中塚康夫, 八幡修平, 亀﨑允啓, 菅野重樹, 水流・小段差・濁水を有する管水路内を自律走行可能な管内移動ロボットの開発, 日本ロボット学会(RSJ), 2024.
- 小池俊宇, 三宅章太, ムスタファ エゼルディン, 鄭文搏, 三宅太文, 菅野重樹, 亀﨑允啓, ケーブル送りと配管内固定機能を有する ケーブル伝動ロボットの開発, 第42回 日本ロボット学会学術講演会, 2024年9月
- 鄭文搏, 亀﨑允啓, 趙聞, 山口薫, 菅野重樹, 可視光通信と太陽光パネルを用いた地下施設検査用ロボットチェインシステム, 第24回計測自動制御学会システムインテグレーション部門講演会, 2023年12月
- 三宅章太,亀﨑允啓,吉田健人,菅野重樹,二重反転ロータを有するダクテッドファン型管内走行ロボットの設計と試作,第41回 日本ロボット学会学術講演会,2023年9月