Infrastructure maintenance and management Group
Research Theme
Development and Control of an Aerial Robot for Pipeline Maintenance
Research Overview
Aerial robots offer effective solutions for infrastructure maintenance in hazardous or hard-to-reach environments such as pipelines. This research presents the development and control of an unmanned aerial manipulator equipped with the necessary mechanisms and tools for use in pipeline maintenance. The system combines compact design with onboard sensing and localization, supported by detailed kinematic and dynamic modeling and robust control strategies to ensure precise trajectory tracking and stable force interaction. Validation through simulations and experimental trials highlights the potential of the system to be employed in infrastructure maintenance tasks.



Outcomes and Presentations (Conference Presentations, Publications, etc.)
International Conference
- Ezeldin N. Moustafa, Mitsuhiro Kamezaki, Shota Miyake, and Shigeki Sugano, “Fuzzy-Adaptive Force-Compliant Control and Sensorless Estimation of a Hybrid Aerial Manipulator for Contact-Based Pipeline Repair,” in Proceedings of the 2026 IEEE/SICE International Symposium on System Integration (SII), 2026, pp. 756-763.
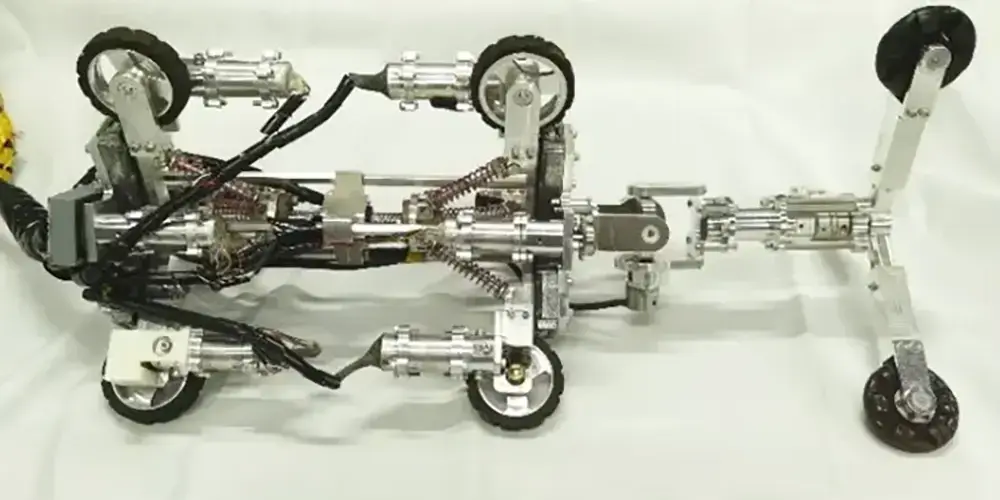
- Ezeldin N. Moustafa, Mitsuhiro Kamezaki, Ahmed Khalifa, Shota Miyake, Tamon Miyake, and Shigeki Sugano, “Development of a Two-DoF Three-Parallelogram Aerial Manipulator for Pipeline Crack Repair Using a Two-Tool End-Effector and Onboard Sensor-Based Localization,” Proceedings of 2025 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. xx–yy, 2025. (Accepted in May 2025)
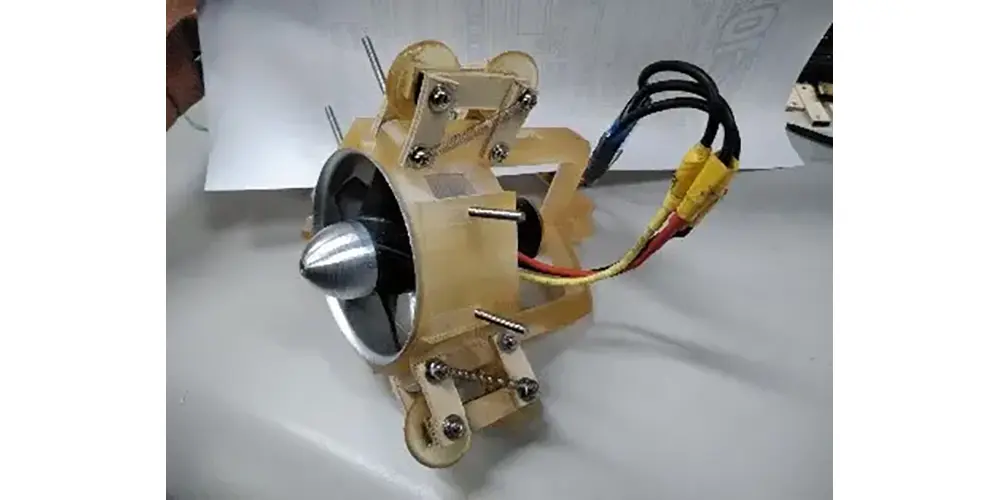
- Shota Miyake, Kento Yoshida, Shigeki Sugano, Mitsuhiro Kamezaki, Preliminary design and evaluation of a ducted-fan type pipeline robot, ROBOMECH Journal, vol. 11, number 17, Dec. 2024
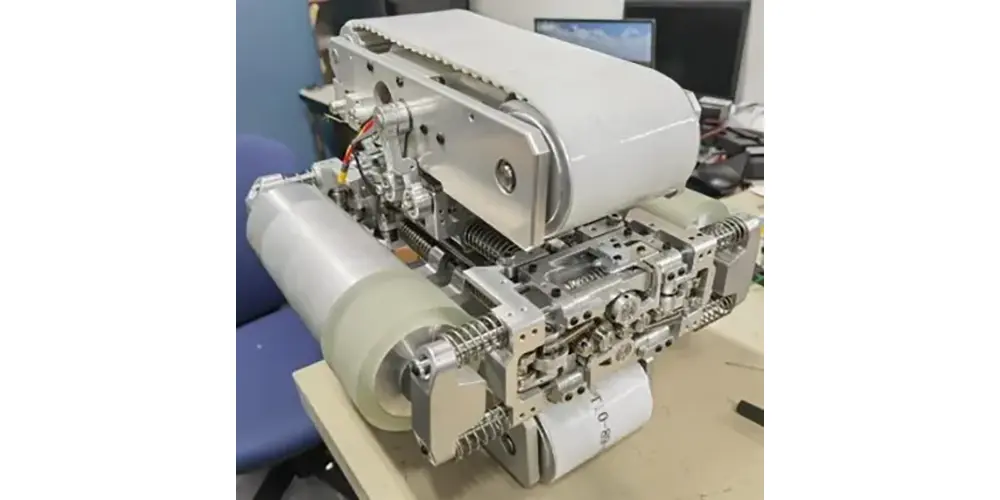
- Wenbo Zheng, Xinheng Jiang, Mitsuhiro. Kamezaki, Chenyu Tai, Peizhi Zhang, Tamon Miyake, Shota Miyake, Xiaomeng Liu, Yasuo Nakatsuka, Shigeki Sugano, “Prototype design of a multi-mode switching module with locking mechanism for water-proof pipeline inspection robots,” in Proceedings of the IEEE/SICE International Symposium on System Integration (SII), pp. 741-746, 2024.
Domestic Conference
- 小池俊宇, 三宅章太, 鄭文搏, 三宅太文, ムスタファエゼルディン, 戴振羽, 菅野重樹, 亀﨑允啓, 小径ガス管検査ロボットシステムの開発, 早稲田オープン・イノベーション・フォーラム2024(WOI’2024), 2024年11月
- 鄭文搏, 三宅章太, 馮伝鑫, 三宅太文, 小池俊宇, 中塚康夫, 八幡修平, 亀﨑允啓, 菅野重樹, 水流・小段差・濁水を有する管水路内を自律走行可能な管内移動ロボットの開発, 日本ロボット学会(RSJ), 2024.
- 小池俊宇, 三宅章太, ムスタファ エゼルディン, 鄭文搏, 三宅太文, 菅野重樹, 亀﨑允啓, ケーブル送りと配管内固定機能を有する ケーブル伝動ロボットの開発, 第42回 日本ロボット学会学術講演会, 2024年9月
- 鄭文搏, 亀﨑允啓, 趙聞, 山口薫, 菅野重樹, 可視光通信と太陽光パネルを用いた地下施設検査用ロボットチェインシステム, 第24回計測自動制御学会システムインテグレーション部門講演会, 2023年12月
- 三宅章太,亀﨑允啓,吉田健人,菅野重樹,二重反転ロータを有するダクテッドファン型管内走行ロボットの設計と試作,第41回 日本ロボット学会学術講演会,2023年9月
Journal
- Ezeldin N. Moustafa, Mitsuhiro Kamezaki, Shota Miyake, and Shigeki Sugano, “A Quadrotor with a New 3-DOF Hybrid Manipulator for Pipeline Maintenance: Design, Modeling, and Task-Space Control,” IEEE Access, vol. 13, pp. 198102–198124, 2025.