Collaborative movement Group
Research Theme
Research on collaborative work and coordinated movement between humans and robots in human-robot coexistence environments
Research Overview
Due to the declining labor force caused by the aging population and low birthrate, there is a growing demand for service robots that can work in human-robot coexistence environments. Against this backdrop, the Coordinated Movement Team is engaged in research and development of systems that can move smoothly in human-robot coexistence environments and collaborate with humans.
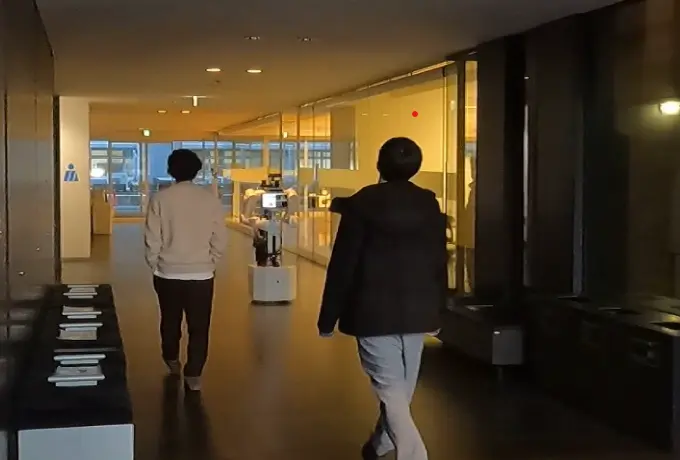
The Coordinated Movement Team is developing a human-cooperative trajectory planning method that generates multiple types of trajectories—such as trajectories where humans and robots mutually yield to each other, or trajectories that assert their presence to humans using arms or voice commands—to prevent trajectories from being generated in crowded environments like stations. This method selects the optimal trajectory based on the current situation.
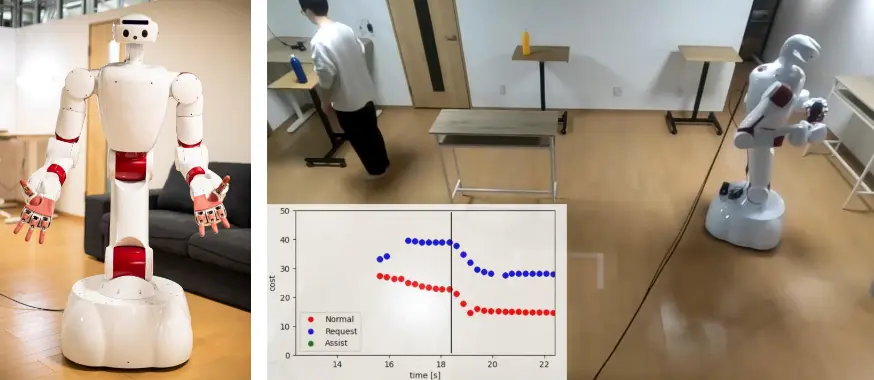
The Collaborative Work Team is developing a robot system that can make decisions based on the intentions of collaborators, as this can sometimes enable smooth collaborative work. The system is designed to switch between asserting and conforming to the intentions of collaborators and the surrounding situation.