WAMOEBA班
研究テーマ
―ロボットに心は生まれるのか
この壮大なテーマに対して、我々は、心を「知 (intelligence) ・情 (emotion, feeling) ・意 (mind, willingness) 」の3つの機能に分類し、特に「情」の側面からのアプローチに着目して研究を行ってきました。数々の思考実験や生物とロボットとのアナロジーを考える中で生まれたのが、WAMOEBA (ワメーバ、Waseda Artificial Mind On Emotion BASE, 早稲田のアメーバ) です。
研究概要
自己保存評価関数とホルモンパラメータ
(WAMOEBA-2 1998年~)
我々はWAMOEBAに、生物を用いた検証や内省によって確率された人間の心理モデルを導入するのではなく、ロボット自身の身体に即した情動表出の創発を期待し、生物の基本的な行動原則である「自己保存の法則」を導入しました。ここで言う情動表出とは、緊張したときに顔を赤らめたり、脂汗をかいたり、猫が天敵に遭遇した際に身の毛を逆立てて警戒するような情動的表現行動です。
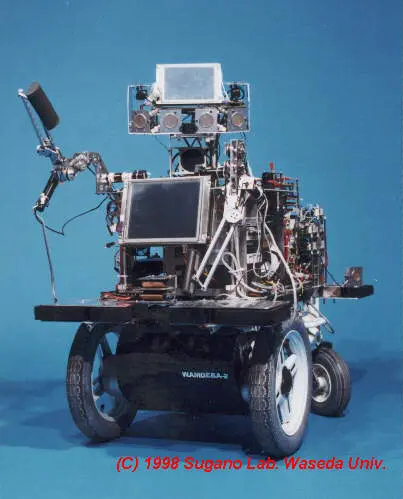
情動表出ロボット「WAMOEBA-2」
- バッテリ電圧(残量)
- バッテリ電流
- 回路温度
- モータ温度
また、自己保存を促進するための自由度として、移動やカメラ操作に加えて、放熱ファンを搭載しました。
自己保存評価関数
自己保存状態を計測するためのセンサごとに、「ロボット自身の自己保存」という原則に従って評価を行う「自己保存評価関数 (self-preservation function) 」を定義しました。自己保存評価関数は、各センサの絶対値と一次微分値を入力とし、出力として「自己保存評価値 (self-preservation value) 」と呼ばれる無次元の正規化された値を出力するファジィメンバシップ関数 (fuzzy membership function) です。この値が大きいほど、自己保存状態が悪い、危険な状態であると定義します。
バッテリ電圧を例とします。満充電に近い電圧値であれば、自己保存評価値は小さくなりますが、PCの最低動作電圧に近い場合は自己保存評価値が急激に上昇します。また、満充電時の電圧よりも高い電圧を示せば、過充電であるとして評価値が高くなるように定義しました。
すべてのセンサ入力に対する自己保存評価値を統合する際には、自己保存評価値中で最大の値を選択し、それをロボット自体の自己保存評価値とします。
ホルモンパラメータ
ロボットの身体を使って情動表現を行うために、我々は「ホルモンパラメータ (hormone parameter) 」を定義しました。ホルモンパラメータは、生物の内分泌系を模倣した各部の制御に影響する媒介変数で、自己保存評価値の絶対値と微分値を使って定義しています。
WAMOEBA-2のホルモンパラメータは全部で4つのパラメータを持ち、自己保存評価値の上昇・下降および絶対値によって、分泌され、時間とともに現象(分解)されていきます。これらをそれぞれ「R-エンドルフィン (R-endorphin)」「R-アドレナリン (R-adrenalin) 」「R-ノルアドレナリン (R-noradrenalin) 」「R-ドーパミン (R-dopamine) 」と名付けました。そして、これらの量に従って、各部の自由度の制御パラメータを変化することとしました。
たとえば、R-エンドルフィンの量が大きい場合は、ロボットの発話時のピッチが高くなることや、R-アドレナリンが分泌された場合は、放熱ファンの回転数が上昇することなどです。
WAMOEBA-2の情動表出
自己保存評価関数とホルモンパラメータの仕組みによって、WAMOEBAにはロボット自身の身体に即した情動表出が可能となりました。例えば、探索行動中にモータの温度が上昇した場合は、運動機能を抑制して、冷却ファンに余剰電流を回します。これによって、観察者にはWAMOEBAが疲れて、人や動物に例えるなら汗をかいているようにも見えるかもしれません。
このように、WAMOEBAプロジェクトでは、設計者の主観によって具体的に切り分けられた感情パラメータを用いなくとも、身体に即した動作によって情動表出が可能であることを示しました。
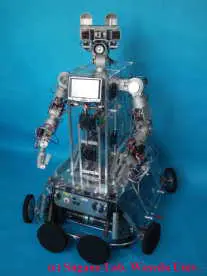
対話型進化的計算による適応的インタラクション
(WAMOEBA-3 2002年~)
本研究では、WAMOEBA-3をプラットフォームとして、ロボットの行動に関わるパラメータを遺伝子にコーディングし、それぞれ異なる沢山の遺伝子に書かれたパラメータを使って、ロボットを動かし、それの動きに対して評価を行う実験を行いました。
適応的インタラクションの問題点
対話型進化的計算を用いた適応的インタラクションによって、学習初期の数時間においては評価値が上昇することが分かりましたが、中期以降は評価値が低下することが分かりました。これは、評価者の肉体的疲労や精神的な疲労による飽き、そしてそれによる評価軸の転換によって既存の好適な遺伝子が低い評価を受けることが確認されました。
ハイブリッド評価による評価者の疲労低減
進化的計算において、動的に変化する評価に対応するには、遺伝子プール内の多様性を保つことが良いとされています。遺伝子プール内の多様性を保つには、個体数を大きくするか、突然変異率を高くすることが考えられます。しかし、対話型進化的計算においては、個体数を大きくすると評価者の評価回数が増加して評価者の肉体的疲労が増加します。また、突然変異率を高くすると学習収束率が低くなるため、被験者の飽きを併発する可能性があります。
これに対して、本研究では、遺伝子を自己組織化マップ (self-organizing map) によって分析し、弁別を行うことに寄って、類似した遺伝子の評価を抑制して評価者の疲労度を抑えつつ、遺伝子プール内の個体数を大きくすることで、実験中盤での高い評価値のキープに成功しました。
成果・発表(学会発表・論文等)
特許
- 名称:情報処理システムおよび情報処理方法,並びにプログラム 発明者:菅野重樹,金天海,尾形哲也 特願2004-363742 特開2006-172141 PCT / JP2005 / 21062
国際学会
- Shunsuke Nagahama, Yousuke Kimura, Chyon Hae Kim, Shigeki Sugano, The Development of Magnetic Powdery Sensor, IEEE SENSORS2014, pp.783-786, 2014
- Shunsuke Nagahama, Shotaro Iida, Chyon Hae Kim, and Shigeki Sugano, “Signal transmission with magnetic powdery wire in a pipeline”, Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO2013), pp.1113-1118, 2013.
- Chyon Hae Kim, Yuki Nishi, Syunsuke Nagahama, Shigeki Sugano, “Finding and Utilizing Self-preserving Functions in Blood Pulsation -Development for Ethanol Based Artificial Circulation System-“, , pp.pp.1034-1039, 2012.
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Enhancement of Self Organizing Network Elements for Supervised Learning” IEEE International Conference on Robotics and Automation,2007
- Yuki SUGA, Chihiro ENDO, Da izo KOBAYASHI, Takeshi MATSUMOTO, Tetsuya OGATA, Shigeki SUGANO, Adaptive Human-Robot Interaction System using Interactive EC, in Proceeding of IEEE/RSJ International Conference on Intelligent Robots and Syst ems (IROS2006), Oct. 2006
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Efficient Organization of Network Topology based on Reinforcement Signals”, IEEE International Conference on Intelligent Robots and Systems, 2006
- Chyon Hae Kim, Jyun-ichi Idesawa, Tetsuya OGATA, Shigeki SUGANO:”Improvement against Noises in Self-Organizing Logic Circuit”, IEEE International Conference on Information Acquisition, 2006
- Yuki SUGA, Tesuya OGATA, Sh igeki SUGANO, Evolutionary Approach for Designing the Behavior Generator of Communication Robot, in Proc eeding of SICE/CICCA Joint Conference, Oct. 2006
- Yuki SYGA, Yoshinori Ikuma, Daisuke Nagao, Tetsuya OGATA, and Shigeki SUGANO, Interactive Evolution of Human-Robot Communication in Real World, in Proceeding of IEEE/RSJ Interanational Conference on Intelligent Robots and Systems (IROS2005), August, 2005
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Self-Organizing Algorithm for Logic Circuit based on Local Rules”, Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2005
- Yuki SUGA, Hiroaki ARIE, Tetsuya OGATA, and Shigeki SUGANO, ”Constructivist Approach to Human-Robot Emotional Communication: Design of Evolutionary Function for WAMOEBA-3″ in Proceeding of IEEE/RAS Interanational Conference on Humanoid Robots (Humanoids 2004), No.76, Nov. 2004
- Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO: ”Development of Emotional Communication Robot, WAMEOAB-3″ in Proceeding of the 4th International Conference of Advanced Mechatronics (ICAM 04), pp413-418, Oct., 2004
- Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, ”Acquisition of Reactive Motions for Communication Robots using Interactive EC”in Proceeding of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2004) , pp.1198-1203, Sept., 2004
- Yusuke AKIWA, Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, ”Imitation based Human-Robot Interaction -Roles of Joint Attention and Motion Prediction-” in Proceeding of the 2004 IEEE International Conference of Human Robot Interactive Communication (ROMAN 2004), pp.283-288,Sept., 2004
- Tetsuya OGATA, Noritaka MASAGO, Shigeki SUGANO, and Jun TANI, “Interactive Learning in Human-Robot Collaboration” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2003), pp.162-167, Oct. 2003
- Kuniaki NODA, Mototaka SUZUKI, Naofumi TSUCHIYA, Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, “Robust Modeling of Dynamics Environment based on Robot Embodiment” in Proc. of IEEE International Conference on Robotics and Automation (ICRA 2003), Sept. pp.3565-3570, 2003
- Tetsuya?OGATA, Noritaka MASAGO, Shigeki SUGANO, and Jun TANI, “Collaboration Development through Interactive Learning between Human and Robot” in Proc. of 3rd International Workshop on Epigenetic Robotics, pp. 99-106, Aug. 2003
- Yasuhisa HAYAKAWA, Tetsuya OGATA, and Shigeki SUGANO, “Flexible Assembly Work Cooperation based on Work State Identifications by a Self-Organizing Map” in Proc. of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), pp. 1031-1036, July 2003
- Tetsuya OGATA, Takaaki KOMIYA, Kuniaki NODA, and Shigeki SUGANO, “Influence of the Eye Motions in Human-Robot Communication and Motion Generation based on the Robot Body Structure” in Proc. of IEEE/RAS International Conference on Humanoid Robots (Humanoid 2001), pp. 83-89, Nov. 2001
- Tetsuya OGATA, Takaaki KOMIYA, and Shigeki SUGANO, “Motion Generation of the Autonomous Robot based on Body Structure” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2001), pp. 2338-2343, Oct.2001
- Tetsuya OGATA, Yoshihiro MATSUYAMA, Takaaki KOMIYA, Masataka IDA, Kuniaki NODA, and Shigeki SUGANO, “Development of Emotional Communication Robot: WAMOEBA-2R -Experimental Evaluation of the Emotional Communication between Robots and Humans-” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2000), Oct., pp. 175-180, Nov. 2000
- Tetsuya OGATA, Takaaki KOMIYA and Shigeki SUGANO, “Development of Arm System for Human-Robot Emotional Communication,” in Proc. of IEEE International Conference on Industrial Electronics, Control and Instrumentation (IECON 2000), pp.475-480, Oct. 2000
- Tetsuya OGATA, Akitoshi SHIMURA, Koji SHIBUYA and Shigeki SUGANO, “A Violin Playing Algorithm Considering the Change of Phrase Impression,” in Proc. of IEEE International Conference on Systems, Man, and Cybernetics (SMC’2000), pp.1342-1347, Oct. 2000
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Robot: WAMOEBA-2R – Emotion Model and Evaluation Experiments-,” in Proc. of IEEE/RAS International Conference on Humanoid Robots (Humanoid 2000), paper no.93, Sept. 2000
- Tetsuya OGATA and Shigeki SUGANO, “The adaptive motion by the endocrine system model in an autonomous robot,” in Proc on International Symposium on Adaptive Motion of Animals and Machines, paper no. E30, August, 2000
- Yasuhisa HAYAKAWA, Tetsuya OGATA, and Shigeki SUGANO, “A Robotic Co-operation System based on a Self-organization approached Human Work Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’2000), pp.4058-4063, April, 2000
- Tetsuya OGATA, Yasuhisa HAYAKAWA, Kensuke SATAKE, and Shigeki SUGANO, “Analysis of Design Process by the Observation of Human Motion,” in Proc. of International Workshop on Emergent Synthesis (IWES’99), pp.167-172,Dec. 1999.
- Yasuhisa HAYAKAWA, Yusuke KIRA, Tetsuya OGATA, and Shigeki SUGANO, “Extraction of Human Intention for Human Co-operating Systems -Prototype Assembling Work Support Robot System according to Human Intention-” in Proc. of International Conference on Advanced Robotics (ICAR’99), pp. 199-204, Oct. 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Between Humans and Robots – Consideration of Primitivee Language in Robots -, ” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’99), pp. 870-875, Oct., 1999.
- Tetsuya OGATA, Takaaki KOMIYA and Shigeki SUGANO, “Human Robot Communication by Physical Interaction – Distributed Agent Control System and The Learning Algorithm -” in Proc. of IEEE International Conference on Systems, Man, and Cybernetics (SMC’99), pp.1005-1010, Oct. 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Between Humans and the Autonomous Robot Which Has the Emotion Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’99),pp.3177-3182, May, 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emergence of Primitive Verbal Communication in Robots,” in Proc. of 5th International Conference on Soft Computing and Information / Intelligent Systems (IIZUKA’98), pp.284-287, Oct. 1998.
- Tetsuya OGATA and Shigeki SUGANO, “Communications Between Behavior-Based Robot with Emotion Model and Human,” in Proc. IEEE International Conference on Systems, Man, and Cybernetics (SMC’98), pp.1095-1100, Oct. 1998.
- Tetusya OGATA and Shigeki SUGANO, “Mechanisums of Internal Secretion System for Intellectual Robots -Towards an Emergence of Emotion in Robots, ” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’98), pp.50-55, Oct. 1998.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Behavior Adjustment System in Robots,” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’97), pp.352-357, Oct. 1997.
- Tetsuya OGATA, Kazuki HAYASHI, Ikuo KITAGISHI and Shigeki SUGANO, “Generation of Behavior Automaton on Neural Network,” in Proc. of IEEE-RSJ International Conference on Intelligent Robot and Systems (IROS’97), Vol.3, pp.608-613, Sept. 1997.
- Tetsuya OGATA and Shigeki SUGANO, “Mechanical System for Autonomic Nervous System in Robots,” in Proc. of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM’97), PaperNo.113, Jun. 1997.
- Tetsuya OGATA and Shigeki SUGANO, “Sense Syncretic Model toward the Construction of ‘Robot-Original-Language’,” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’96), pp.433-438, 1996.
- Shigeki SUGANO and Tetsuya OGATA, “Emergence of Mind in Robots for Human Interface – Research Methodology and Robot Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’96), pp.1191-1198, 1996.
- Ichiro.KATO, “Homini-Robotism,” in Proc. of IEEE International Conference on Advanced Robotics (ICAR’91), pp.1-5, 1991.
国内学会
- 右田かよ,長濱峻介,木村洋介,菅野重樹, “金属の電着による摩耗修復機構の提案”,ROBOMECH2015,2015年5月
- 長濱峻介,菅野重樹,”人工循環器系による物質供給を利用したロボットの自己修復・自己維持システムの提案”,第24回バイオメカニズムシンポジウム,2015年7月
- 長濱峻介,木村洋介,金天海,菅野重樹:物質供給により修復するMagnetic Powdery Sensorの開発,第35回バイオメカニズム学術講演会,59-62,2014
- 木村洋介、長濱峻介、菅野重樹:食べる動作を行うロボットが人間に与える印象についての研究,2014年度人工知能学会全国大会(第28回),2J1-1,2014
- 米山大樹,長濱峻介,飯田翔太郎,菅野重樹:物質を利用して自己修復,メンテナンスを行う機械システムのための物質輸送手法の提案,日本機械学会ロボティクス・メカトロニクス講演会2014論文集(Robomec’14),3A1-K02,2014
- 木村洋介、右田かよ、長濱峻介、金天海、菅野重樹 :機械システムの摺動部における摩耗箇所の修復手法の提案,第15回計測自動制御学会システムインテグレーション部門講演会,634-637(1H4-5),2014
- 長濱峻介,西佑樹,金天海,菅野重樹: 生体の働きを模擬した多機能一体型循環器系システムの開発, ロボティクス・メカトロニクス講演会2012(ROBOMEC2012), 1A2-Q07, 2012.
- 長濱峻介,山崎由美子,金天海,菅野重樹: 物-ロボット間の心の乗り移りに対する認知の評価, ヒューマンインタフェースシンポジウム2012, pp. 187-190, 2012.
- 長濱峻介,西佑樹,金天海,菅野重樹: 循環器系システムにおける拍動による自己修復促進とフィルタの目詰まり抑制, 第30回日本ロボット学会学術講演会, 1I2-8, 2012.
- 金天海,山崎由美子,長濱峻介,菅野重樹: 人はどこにエージェントの境界を感じるのか~ヒューマンロボットインタラクションにおけるエージェントの境界認識のコントロール~, JAWS2012, 2012.
- 金 天海,尾形哲也,菅野重樹:自己組織化回路素子(SONE)への教師あり学習の付与 (学生奨励賞) , 情報処理学会 第69回全国大会,2007年
- 出澤 純一, 金 天海, 尾形 哲也, 菅野 重樹:自己組織化ネットワーク素子群における対ノイズ性能向上, ロボティクス・メカトロニクス講演会,2006年
- 金 天海,尾形哲也,菅野重樹:自己組織化回路素子SONEへの教師あり学習機能の付与, 第7回 計測自動制御学会システムインテグレーション部門講演会,2006年
- 出澤純一,金 天海,尾形哲也,菅野重樹:自己組織化回路素子SONEにおけるフリップフロップ素子導入によるシーケンスの分節化と統合, 第7回 計測自動制御学会システムインテグレーション部門講演会,2006年
- 金天海・出澤純一・尾形哲也・ 菅野重樹:自己組織化論理回路における対ノイズ性能の向上, 第24回 日本ロボット学会学術講演会,2006年
- 金天海・尾形哲也・ 菅野重樹:自己組織化論理回路における学習アルゴリズムの解析, 第6回 計測自動制御学会システムインテグレーション部門講演会,2005年
- 金天海・尾形哲也・ 菅野重樹:ローカルルールに基づいた論理回路の自己組織化アルゴリズム, 第5回 計測自動制御学会システムインテグレーション部門講演会,2004年
- 小宮孝章・野田邦昭・土屋尚文・尾形哲也・菅野重樹:分散エージェントを用いた全身協調による動作生成,日本機械学会ロボティクス・メカトロニクス講演会,2P1-D06,2002年6月
- 大竹正海・坂本義弘・尾形哲也・菅野重樹:模倣を主体とした人間とロボットのコミュニケーション,日本機械学会ロボティクス・メカトロニクス講演会,1P1-K03,2002年6月
- 野田邦昭・井田真高・尾形哲也・菅野重樹:身体性に基づいた状態表現機能を持つロボットと人間のコミュニケーション,日本機械学会ロボティクス・メカトロニクス講演会,1P1-D10,2001年6月
- 尾形哲也,菅野重樹:情動表現生成のためのロボット構造とシステムの統合,計測自動制御学会SIシンポジウム,2000年 12月 (発表予定)
- 尾形哲也,菅野重樹:情緒交流と自律行動生成のためのロボット構造,第6回IFToMM会議シンポジウム,pp.14-17, 2000年11月
- 尾形哲也, 志村明俊, 宇野格, 渋谷恒司, 菅野重樹:フェーズの 印象変化を考慮したバイオリン演奏アルゴリズムの構築,第21回バイオメカニズム学会学術講演会,pp.173-176, 2000年11月
- 尾形哲也,松山佳彦,小宮孝章,井田真高,野田邦昭,菅野重樹: 人間と自律ロボットのコミュニケーションに関する実験的考察~システム設計と心理評価の異母集団比較,第18回日本ロボット 学会学術講演会,pp.479-480, 2000年9月
- 尾形哲也,松山佳彦,小宮孝章,井田真高,野田邦昭,菅野重樹: 自律ロボットWAMOEBA-2Rの開発~アームシステムの搭載と心理実験,日本機械学会ロボティクスメカトロニクス講演会,1A1-80-114, 2000年5月
- 早川泰久,佐竹賢亮,内田信宏,尾形哲也,菅野重樹: 未知作業支援に適用可能な作業状態モデル生成手法に関する研究,第5回ロボティクスシンポジア,pp.260-265,2000年3月
- 尾形哲也,松山佳彦,小宮孝章,井田真高,野田邦昭,菅野重樹: 情緒交流ロボットWamoeba-2Rの開発~システム構成と評価実験,第5回ロボティクスシンポジア,pp.68-73,2000年3月
- 早川泰久,内田信宏,佐竹賢亮,尾形哲也,菅野重樹:人間-ロボット相 互関係分析に基づくマニピュレータ支援行動生成,第20回バイオメカニズム学会学術講演会,pp.380-381,1999年11月
- 早川泰久,佐竹賢亮,尾形哲也,菅野重樹:身体運動観察に基づく組立作業過程の記号化と分析,第17回日本ロボット学会学術講演会,pp. 1067-1068,1999年9月
- 尾形哲也,小宮孝章,菅野重樹:人間とロボットの物理的コミュニケーショ ン-アームシステムの開発と分散エージェントによる行動獲得-,第17回日本ロボット学会学術講演会,pp. 423-424,1999年9月
- 尾形哲也,日塔潔,小宮孝章,松本典剛,菅野重樹:情緒交流ロボット Wamoeba-2のアームハンド機構の開発~分散エージェントによる動作生成~,日本機械学会ロボティクスメカトロニクス講演会,2P2-79-103,1999年6月
- 早川泰久,吉良雄介,佐竹賢亮,内田信宏,尾形哲也,菅野重樹:頭部・ 手部位置および把持情報の構造化による暗黙意図の抽出,日本機械学会ロボティクスメカトロニクス講演会,2A1-76-118,1999年6月
- 尾形哲也,松山佳彦,菅野重樹:ロボットと人間の情緒交流~ロボットに おける前言語発生の考察~,第4回ロボティクス・シンポジア,pp. 44-49, 1999年3月(査読付)
- 早川泰久,吉良雄介,尾形哲也,菅野重樹:組立作業支援を目的としたシ ンセシスモデル構築に関する研究~組立動作情報を基にした時系列NNによる構造化~,精密工学会春季大会学術講演会講演論文集,p.534,1999年3 月
- 尾形哲也,早川泰久,吉良祐介,菅野重樹:人間のシンセシス活動の抽出とモデル化~人間機械協調システムを用いた一考察~,日本学術振興会未来開拓事業 人間指向シンセシスの科学 早稲田慶応成果報告会(第2回) 講演論文集,pp.70-73,1998年12月
- 尾形哲也,菅野重樹:ロボットにおけるホルモン系モデルとその影響~身 体制御と環境適応~,第19回バイオメカニズム学会学術講演会,pp.71-72, 1998年11月
- 尾形哲也,早川泰久,菅野重樹:組立作業支援システムの構造~人間指向 シンセシスの解釈~,日本機械学会設計工学・システム部門講演会, pp.169-170,1998年11月
- 菅野重樹:情緒コミュニケーションに必要な機能と形態,日本機械学会第 76期全国大会講演資料集, Vol.4, pp.284-285, 1998年10月
- 尾形哲也,松山佳彦,大塚卓美,菅野重樹:ロボットの前言語的表現とコ ミュニケーション,第16回日本ロボット学会学術講演会,pp.645-646, 1998年9月
- 尾形哲也,日塔潔,菅野重樹:ロボットにおける感覚行動マップと行動計 画への展開,第16回日本ロボット学会学術講演会,pp.429-430,1998年9月
- 尾形哲也,大塚卓美,菅野重樹:ロボットの身体性に基づく感情モデルと 内部表象獲得モデル,日本機械学会ロボティクスメカトロニクス講演会, 2CII4-3,1998年6月
- 尾形哲也,大塚卓美,菅野重樹:ロボットの自律系モデルによる情緒表現 と評価実験,日本機械学会ロボティクスメカトロニクス講演会,2BII1-6, 1998年6月
- 尾形哲也,菅野重樹:ロボットと人間の情緒交流~自律系モデルの効果と 試行実験~,第3回ロボティクス・シンポジア,pp.41-46,1998年5月(査読付)
- Tetsuya OGATA and Shigeki SUGANO, “Acquisition of Holophrastic Speech in Autonomous Robots-Toward the Emergence of Verbal Communication in Robots-,” Toward a Science of Consciousness “Tucson III,” PaperNo.250, Apr. 1998.(査読付)
- 菅野重樹,渋谷恒司,尾形哲也:人間共存ロボットにおける心的コミュニ ケーション,電気学会全国大会講演論文集,S.18-21-S.18-25,1998年3月
- 菅野重樹,渋谷恒司,尾形哲也:行動型自律ロボットWAMOEBA-2と人間との 情緒的インタラクション実験,第3回重点領域研究「知能ロボット」シンポジウム予稿集,pp.149-152,1998年1月
- 尾形哲也,菅野重樹:シンセシスのための心的言語処理,日本学術振興会 未来開拓事業人間指向シンセシスの科学 早稲田慶応成果報告会(第1回) 講演論文集,pp.9-10,1997年12月
- 尾形哲也, 川端邦明, 藤井輝夫, 淺間 一, 遠藤 勲, 菅野重樹:異種ロ ボット間のインタラクション試行実験,第15回ロボット学会学術講演会予稿集,Vol.3,pp.833-834,1997年9月
- 藤井輝夫,石田慶樹,黒田洋司,國井康晴,菅野重樹,橋本秀紀:インター ネットにおける物理メディアとしてのロボットシステム,第15回ロボット学会学術講演会予稿集,Vol.3,pp.823-824,1997年9月
- 尾形哲也, 大塚卓美, 菅野重樹:自律ロボットの人間との対話表現の獲得, 第15回ロボット学会学術講演会予稿集,Vol.2,pp.397-398,1997年9月
- 尾形哲也, 菅野重樹:ロボットにおける自律的情動反応の生成,第15回ロ ボット学会学術講演会予稿集,Vol.2,pp.385-386,1997年9月
- Tetsuya OGATA and Shigeki SUGANO, “Emergence of emotional expression of robots based on the internal secretion system,” The Brain and Self Workshop: Toward a Science of Consciousness, PaperNo.61, Aug. 1997.(査読付)
- 菅野重樹, 尾形哲也:人間と機械の心的交流, 計測自動制御学会 SICE学術 講演会予稿集,pp.1327-1328, 1997年8月
- 尾形哲也, 北岸郁雄, 菅野重樹:ニューラルネットワークによるビヘイビ アネットワークの自己組織化, 日本機械学会 ロボティクス・メカトロニク ス講演会’97予稿集B,pp.1169-1172, 1997年6月
- 尾形哲也, 菅野重樹:ロボットにおける自律系~WAMOEBA-2の自律系ハード ウェアとその影響~, 日本機械学会 ロボティクス・メカトロニクス講演会’97 予稿集A,pp.567-568, 1997年6月
- 菅野重樹,尾形哲也,渋谷恒司:ロボットにおける自律系の導入~ハード ウェア構成とアルゴリズムの提案~,第2回重点領域研究「知能ロボット」シンポジウム予稿集,pp.111-114,1997年1月
- 尾形哲也,中村好伸,菅野重樹:人間とロボットの情緒交流に関する研究~ 情緒の表出とその形態に関する一考察~,第14回ロボット学会学術講演会予稿集,Vol.3,pp.1149-1150,1996年11月
- 尾形哲也,林 一樹,大塚卓美,北岸郁雄,菅野重樹:ロボットの自律的 行動計画の生成~神経回路による時系列オートマトンの獲得とその応用~,第14回ロボット学会学術講演会予稿集,Vol.2,pp.699-700,1996年11月
- 尾形哲也,中村好伸,菅野重樹:ロボットにおける自律系の機構,第14回 ロボット学会学術講演会予稿集,Vol.1,pp.389-390,1996年11月
- 菅野重樹,尾形哲也:人間共存ロボットにおける情緒の意義,日本機械学 会,No.96-8,第1回ロボメカ・シンポジア講演論文集,pp.97-100,1996 年5月
- 尾形哲也,菅野重樹:人間とロボットの情緒交流に関する研究~評価ロボッ ト”WAMOEBA-2″の設計と製作~,日本機械学会ロボティクス・メカトロニ クス講演会’96予稿集,pp.449-452,1996年6月
- 尾形哲也,林 一樹,菅野重樹:移動ロボットにおける行動計画のための 時系列情報獲得~刺激蓄積効果による時系列ネットワークの生成~,日本機械学会 ロボティクス・メカトロニクス講演会’96予稿集,pp.133-136, 1996年6月
- 菅野重樹,尾形哲也:情緒交流ロボットWAMOEBA-2の設計,第1回重点領域 研究「知能ロボット」シンポジウム予稿集,pp.117-120,1996年1月
- 尾形哲也,菅野重樹:ロボットにおける自律系と移動方向判断アルゴリズ ム,第13回ロボット学会学術講演会予稿集,pp.265-266,1995年11月
- 尾形哲也,菅野重樹:ロボットが心を持つ可能性に関する研究~内外感覚 の統合~,第13回ロボット学会学術講演会予稿集,pp.1195-1196,1995年11月
- 尾形哲也,菅野重樹:人間とロボットの情緒交流に関する研究~ロボット の内部状態の表出~,日本機械学会ロボティクス・メカトロニクス講演会’95 予稿集,pp.877-878,1995年6月
- 尾形哲也,菅野重樹:ロボットにおける心の発生~志向性と行動~,日本 機械学会第72期通常総会講演論文集(IV),pp.271-272,1995年4月
- 尾形哲也,山本健次郎,菅野重樹:ロボットにおける心の発生~記憶情報 処理の導入~,第12回ロボット学会学術講演会予稿集,pp.129-130,1994 年11月
- 菅野重樹,玉本淳一,山本健次郎,尾形哲也,加藤一郎:ロボットにおけ る心の発生~第2報:自己保存評価関数と基礎実験~,第11回ロボット学会学術講演会予稿集,pp.767-770, 1993年11月
- 菅野重樹,玉本淳一,山本健次郎,尾形哲也,加藤一郎:ロボットにおけ る心の発生~第1報:評価用機械モデルの設計・製作~,第11回ロボット学会学術講演会予稿集,pp.763-766,1993年11月
- 菅野重樹,玉本淳一,加藤一郎:ロボットにおける心の発生~心のメカニ ズムとシステム度~,第10回ロボット学会学術講演会予稿集,pp.257-260, 1992年11月
雑誌論文
- Shunsuke Nagahama, Shotaro Iida, Hiroki Yoneyama, Shigeki Sugano, “Method to obtain only targeted substances from an artificial circulatory system,” IFToMM World Congress 2015,DOI Number:10.6567/IFToMM.14TH.WC.OS1.019,pp.91-95, 2015
- 金 天海,出澤純一,尾形哲也,菅野重樹:”自己組織化論理回路におけるノイズの抑制”?日本ロボット学会誌 Vol.25 No.6,(2007) *Coming Soon*
- 菅野重樹, 尾形哲也:ロボットによるコミュニケーションの研究 ―情緒交流ロボットWAMOEBA―, 日本ロボット学会誌, Vol.24, No.6, pp.688-691, 2006年9月
- Mototaka SUZUKI, Kuniaki NODA, Yuki SUGA, Tetsuya OGATA, and Shigeki SUGANO: Dynamic Perception after Visually-Guided Grasping by a Human-Like Autonomous Robot, Advanced Robotics, VSP and Robotics Society of Japan, Vol.20, No. 2, pp. 233-254, Feb. 2006
- 金天海, 尾形哲也, 菅野重樹: ローカルルールに基づいた理論回路の自己組織化アルゴリズム, 計測自動制御学会論文誌, Vol. 42, No. 4, 2006年4月
- 尾形哲也, 菅野重樹:人間とロボットの情緒的コミュニケーションの実験的 評価~アームハンドによる 人間との物理的インタラクション, システム制御 情報学会論文誌, Vol.13, No.12, pp.566-574, 2000年
- Tetsuya OGATA, Yoshihiro MATSUYAMA, and Shigeki SUGANO: Acquisition of the Internal Representation in Robots -Toward the Human Robot Communication Using the Primitive Language, The International Journal of the Robotics Society of Japan (Advanced Robotics), Vol.14, No.4, pp.277-291, 2000
- Tetsuya OGATA and Shigeki SUGANO: Emotional Communication between Humans and the Autonomous Robot WAMOEBA-2 (Waseda Amoeba) Which has the Emotion Model, JSME International Journal, Series C: Mechanical Systems Machine Elements and Manufacturing, Vol.43, No.3, pp. 568-574, Sept. 2000.
- Yasuhisa HAYAKAWA, Ikuo KITAGISHI, Yusuke KIRA, Kensuke SATAKE, Tetsuya OGATA, and Shigeki SUGANO: An Assembling Support System based on a Human Model -Provision of Physical Support According to Implicit Desire for Support, Journal of Robotics and Mechatronics, Vol.12, No.2, pp.118-125, 2000
- 日本機械学会編:メカノクリーチャ,コロナ社,2003年4月(第7章担当)
- Tetsuya OGATA and Shigeki SUGANO: Consideration of Emotion Model and Primitive Lnaguage of Robots, FLSI-Vol.3 “What should be computed to understand and model brain function? -From Robotics, Soft Computing, Biology and Neuroscience to Cognitive Philosophy-” , World Scientific Publishing Co., March 2001
- 尾形哲也, 菅野重樹:身体性に基づくロボットと人間とのコミュニケーション, bit別冊「身体性とコンピュータ」, 岡田美智男, 三嶋博之, 佐々木正人編, 共立出版, pp.195-207, 2000年8月
過去に所属していたメンバー
- 佐藤 充希
- 本間 大樹
- 石川 雄大
- ズャーリッチ 和樹
- 三宅 章太
- 右田 かよ
- 中尾 徳志
- 田辺 潤一
- 米山 大樹
- 本間 裕明
- 木村 洋介
- 飯田 翔太郎
- 西 佑起
- 有江 浩明
- 出澤 純一
- 遠藤 ちひろ
- 小林 大三
- 鈴木 貴晴
- 金 天海
- 菅 佑樹
- 尾形 哲也
- 松本 猛
- 岩丸 大二郎
- 岡田 欣也
- 奥出 京司郎
- 鈴木 亮太
- 阿部 博行
- 飯塚 健
- 遠藤 哲郎
- 近藤 裕樹
- 坂上 徳翁