協働ロボットのための分散型皮膚センサの開発
研究テーマ
協働ロボットのための分散型皮膚センサの開発
研究概要
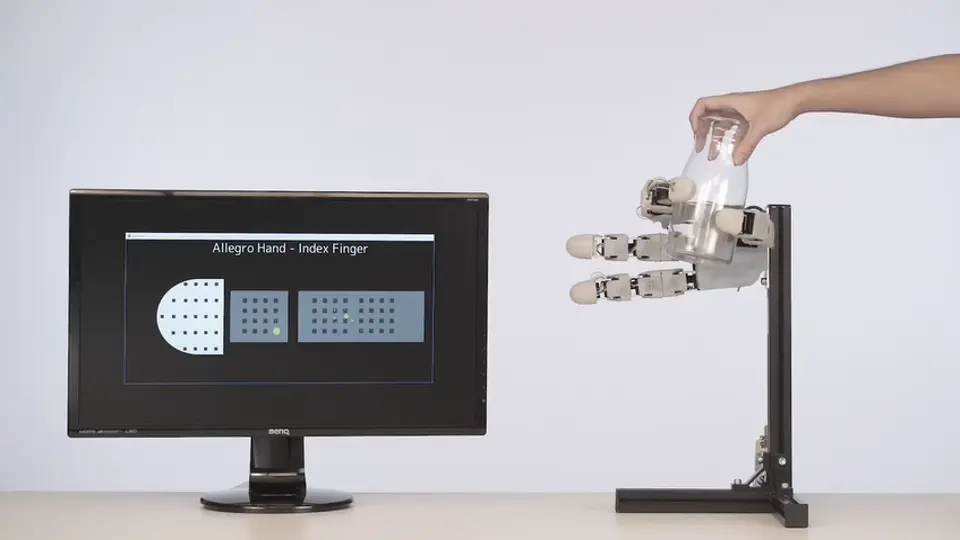
センサ班は、協働ロボット向けの分散型皮膚センサを開発しています。ロボットハンド用の皮膚は、最小限の配線で分散型3軸力計測を可能にします。スピンオフとして xelarobotics.com を展開しています。現在、グループでは高性能なセンシング特性を実現するために、伸縮性ワイヤや液体封入型センサの実装を進めています。触覚センサは重量検知、滑り検知、その他さまざまなタスクに利用可能です。また、ロボットアーム用の皮膚は人間の接近を検知し、安全な人間・ロボット間のインタラクションを可能にします。

成果・発表(学会発表・論文等)
国際学会
- Somlor, S., Hartanto, R.S., Schmitz, A. and Sugano, S. (2015) *A Novel Tri-axial Capacitive-Type Skin Sensor*. Advanced Robotics, 29(21), pp. 1375-1391, doi: 10.1080/01691864.2015.1092394. **FANUC FA Foundation Award 2017** (Prize: 1 million yen)
- Tomo, T.P., Schmitz, A., Wong, W.K., Kristanto, H., Somlor, S., Hwang, J., Jamone, L., Sugano, S. (2018) *Covering a Robot Fingertip With uSkin: A Soft Electronic Skin With Distributed 3-Axis Force Sensitive Elements for Robot Hands*. IEEE Robotics and Automation Letters (RA-L), 3(1), pp. 124-131, doi: 10.1109/LRA.2017.2734965. Presented also at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017)
- Tomo, T.P., Regoli, M., Schmitz, A., Natale, L., Kristanto, H., Somlor, S., Metta, G., Sugano, S. (2018) *A New Silicone Structure for uSkin – a Soft, Distributed, Digital 3-axis Skin Sensor – and its Integration on the Humanoid Robot iCub*. IEEE Robotics and Automation Letters (RA-L), 3(3), pp. 2584-2591, doi: 10.1109/LRA.2018.2812915. Presented also at IEEE International Conference on Robotics and Automation (ICRA 2018)
- Kristanto, H., Sathe, P., Schmitz, A., Tomo, T. P., Somlor, S., Sugano, S. (2018) *A Wearable Three-Axis Tactile Sensor for Human Fingertips*. IEEE Robotics and Automation Letters (RA-L), 3(4), pp. 4313-4320, doi: 10.1109/LRA.2018.2864669. Presented also at IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018).