遠隔操作・災害対応班
研究テーマ
災害対応ロボット、無限自然歩行装置
研究概要
災害対応ロボット
東日本大震災をはじめとする、自然災害が発生した際、災害対応作業が求められている。そうした災害現場には、がれきの山や、放射線による環境汚染、建物の倒壊といった様々な危険性があり、現状のように人が災害対応作業を行うことは危険である。
そこで、人の代わりに災害対応ロボットが投入されることが期待されている。このような期待を背景に、多自由度災害対応ロボットOCTOPUSが開発された。このロボットは4 本の腕と4つのフリッパを有しており、腕を使った段差のぼりや4 腕を使って複雑な作業を行うことができる。タイプとしては油圧型、電動型である。
無限自然歩行装置
通常の平地歩行と同じような感覚で無限に歩くことができる無限自然歩行の実現を目的に、トレッドミルとワイヤ牽引装置で構成する無限自然歩行装置や歩行時インピーダンス推定を研究をしています。

災害対応ロボット
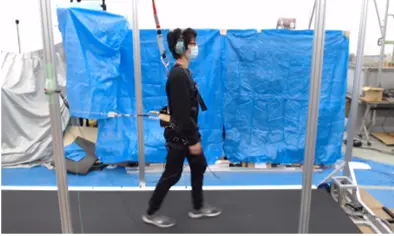
無限自然歩行装置
成果・発表(学会発表・論文等)
国際学会
- Kamezaki et al., “Predictive Energy Stability Margin: Prediction of Heavy Machine OverturningConsideringRotation andTranslation,” inIEEERoboticsandAutomation Letters,vol. 10,no.4, pp. 3286-3293, April 2025
国内学会
- 平野他, 無限自然歩行装置における床加速·紐牽引のタイミングが歩行に与える影響分析, SI2024