ロボットのためのポジショニング
研究テーマ
移動を伴うサービスロボットにおいて、自己位置を推定することは非常に重要な機能と言えます。本プロジェクトでは、GPS互換の屋内送信機を用い、屋内外をシームレスに数cm~数10cmレベルで測位することを目指し研究を行なっています。
研究概要
人間に何らかのサービスを提供するロボットの多くは「移動」を伴い、そのベースとなるナビゲーション技術・ポジショニング技術はロボティクスにおける最も重要な技術の一つと言われています。それら技術を支えるインフラとして、屋外ではGPSを中心とした衛星測位がデファクトスタンダード(事実上の標準)となっていますが、屋内においては、様々な手法が提案されているものの未だ決め手がありません。ここで、もし屋内でGPS互換の測位技術が使用できれば、単一の受信機により屋内外をシームレスに測位することが可能となり、デバイスのコスト削減や利便性の向上に繋がります。本プロジェクトでは、屋内GPS技術として「インドア・メッセージング・システム(IMES)」と「スードライト(擬似衛星)」に着目し、それらをロボットに応用する研究を行なっています。
ドップラー測位手法による高精度IMES(2010年~)
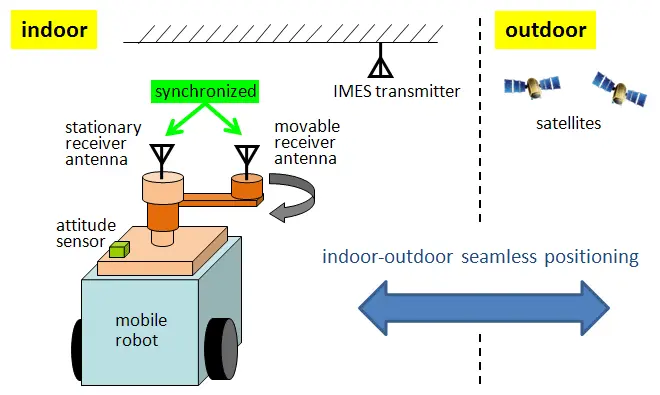
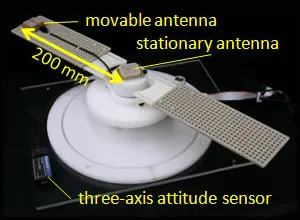
インドア・メッセージング・システム(IMES)は宇宙航空研究開発機構(JAXA)が人間へのサービス用途に開発した屋内GPS技術です。IMESはGPSと同等の信号を用いたアクティブRFIDタグであり、地下街や建物の中など、GPSの電波が届かない屋内に通常10m程度の間隔で設置し、受信端末がどの送信機の近傍にあるかを判定することにより測位を行う簡易なデバイスです。屋外のGPSと異なり三辺測量を行わないため、精度は送信機の設置間隔(10m程度)と等しくなります。これは人間へのサービス(例えば、位置を伴う緊急通報や、位置に基づく広告など)には問題のない精度ですが、ロボットの制御に使用する場合、最低でも数10cmの精度が必要となるため、そのまま用いることはできません。そこで本研究では、IMESを高精度化する手法として、「ドップラー測位手法」を提案しました(図1)。本手法では、受信機のアンテナを動かす(回転させる)ことで得られる搬送波のドップラー変化、可動アンテナの局所座標系における位置、および姿勢センサから得られる絶対姿勢情報を用いて観測方程式を立て、それらを最小二乗法やカルマンフィルタなどで解くことで位置を算出します。
スードライト(2005年~2009年)
成果・発表(学会発表・論文等)
国際学会
- Kenjiro FUJII, Takamasa KAWAGUCHI, Hisanori MATSUMOTO, Makoto TANIKAWARA, Takashi TOYAMA, Yoshihiro SAKAMOTO, Wei WANG, Hiroaki ARIE, Alexander SCHMITZ, Shigeki SUGANO, “Methods for Improving IMES Transmitters: Transmission Diversity, Variable Beamwidth Antenna, and Leaky Coaxial Cable,” In Proc. of the 2015 IEEE/SICE International Symposium on System Integration (SII2015), Nagoya, Japan, Dec. 2015
- Kenjiro FUJII, Wei WANG, Yuto KANEKO, Yoshihiro SAKAMOTO, Hiroaki ARIE, and Shigeki SUGANO, “Accurate indoor positioning using IMES radio,” In Proc. of the IEEE International Conference on Mechatronics and Automation (ICMA), pp. 1966 ? 1971, Beijing, China, Aug. 2015
- Yoshihiro Sakamoto, Yui Totoki, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Indoor Positioning based on Difference between Carrier-phases Transmitted from Proximately-located Antennas of a Multi-channel Pseudolite”, Proc. of International Conference on Innovative Engineering (ICIES2012), 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with Orientation Estimation by Using Multiple Transmitters for High-accuracy IMES Localization”, Proc. of 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN2012), pp.presentation 111, 2012.
- Yoshihiro Sakamoto, Kenri Kodaka, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Active-localization methods for mobile robots in a coarsely structured environment with floor-embedded RFID tags and indoor GPS”, Proc. of 2012 IEEE International Conference on Mechatronics and Automation (ICMA2012), pp.539-545, 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “GPS-compatible Indoor-positioning Methods for Indoor-outdoor Seamless Robot Navigation”, Proc. of 2012 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO2012), pp.95-100, 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjirou Fujii, and Shigeki Sugano, “Real-time Indoor Positioning with a Single IMES Transmitter and a Rotation-type Doppler Measurement Unit”, International Global Navigation Satellite Systems (IGNSS) 2011 (incorporating the International Symposium on GPS and GNSS), Nov. ,2011.
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “High-Accuracy IMES Localization Using a Movable Receiver Antenna and a Three-axis Attitude Sensor,” 2011 International Conference on Indoor Positioning and Indoor Navigation, Sep. 2011
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Initial Value Analysis of a Nonlinear Least-Square Method for Indoor Doppler Positioning with a Single Pseudolite,” SICE Annual Conference 2011, Sep. 2011
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with a Movable Receiver Antenna and a Single Pseudolite for Indoor Localization,” 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2011), pp.19-24, Jul. 2011
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Multiplexing Receivers to Improve Positioning Success Rate for Pseudolite Indoor Localization”, 7th International Symposium on Mechatronics and its Application (ISMA2010), CD-ROM, April, 2010
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Pseudolite Indoor Localization Using Multiple Receivers – Performance Analysis of Increasing Receivers and Transmitters -“, 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN2010), CD-ROM, September, 2010
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Indoor Positioning with Pseudolites”, SICE Annual Conference 2010, CD-ROM, August, 2010
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Takuji Ebinuma, and Shigeki Sugano, “Indoor GPS Receiver for Mobile Robot” Proc. of International Symposium on GPS/GNSS 2008(GNSS 2008), Nov. 2008.
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Takuji Ebinuma, and Shigeki Sugano, “Indoor GPS and Receiver for Robot Navigation – Seamless Positioning between Indoor and Outdoor Space -” Proc. of International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2008), Nov. 2008
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Masaumi Otake, Seiji Kawaguchi, Kenjirou Fujii, Yuki Kanemori, and Shigeki Sugano, “GPS-based Indoor Positioning system with Multi-Channel Pseudolite” Proc. of IEEE-RAS International Conference on Robots and Automation (ICRA 2008), May 2008.
国内学会
- 金子雄人, 汪偉, 坂本義弘, 有江浩明, 藤井健二郎, 菅野重樹, “ロボットのための電波伝搬モデルを用いた IMES測位の精度向上に関する研究,”日本機械学会ロボティクスメカトロニクス講演会, 2A1-O03, 京都
- 金子雄人, 汪偉, 坂本義弘, 有江浩明, 藤井健二郎, 菅野重樹, “IMESの搬送波・ノイズ比を用いた電波伝搬モデルによる人やロボットのための屋内高精度測位,” 測位航法学会全国大会, 東京, 2015年4月
- 坂本義弘,川口貴正,海老沼拓史,藤井健二郎,菅野重樹: 多チャンネル同期型スードライトにおける近接アンテナ間の搬送波位相差を用いた屋内測位, GPS/GNSSシンポジウム2012, 2012.
- 坂本義弘,海老沼拓史,藤井健二郎,菅野重樹: リアルタイム・キネマティック・ドップラー測位による高精度IMES, 平成24年度測位航法学会全国大会, 2012.
- 坂本義弘,海老沼拓史,藤井健二郎,菅野重樹: IMESを用いた移動ロボットのためのリアルタイム・キネマティック・ドップラー測位,, ロボティクス・メカトロニクス講演会2012, 2012.
- 坂本義弘,有江浩明,海老沼拓史,藤井健二郎,菅野重樹:単一スードライトと可動型受信機を用いたロボットのための屋内測位, ロボティクス・メカトロニクス講演会2011(ROBOMECH2010), CD-Proc., May 2011
- 坂本義弘,海老沼拓史,藤井健二郎,菅野重樹:インドアGPSタグにおける測位精度向上手法の提案, 第11回計測自動制御学会システムインテグレーション部門学術講演会(SI 2010), CD-Proc., 2010.12
- 坂本義弘,海老沼拓史,藤井健二郎,菅野重樹:次世代ロボット共通プラットフォームとしての屋内測位技術, 第11回計測自動制御学会システムインテグレーション部門学術講演会(SI 2010), CD-Proc., 2010.12
- 坂本義弘,丹羽治彦,海老沼拓史,藤井健二郎,菅野重樹:屋内スードライト測位において測位成功率を向上させるための受信機多重化,計測自動制御学会システムインテグレーション部門学術講演会(SI2009), 3I2-3, 計測自動制御学会, Dec. 2009.
- 丹羽治彦, 小鷹研理, 坂本義弘, 大竹正海, 金森道, 菅野重樹, 海老沼拓史: スードライトを用いた屋内GPSによるロボットポジショニング, 第9回計測自動制御学会システムインテグレーション部門講演会(SI 2008), Dec. 2008
- 丹羽治彦, 海老沼拓史, 小鷹研理, 坂本義弘, 大竹正海, 金森道, 藤井健二郎, 菅野重樹: 屋内GPSを用いた移動ロボットの実時間ポジショニング -移動ロボット実装用としてのGPS 受信機開発-, 第26回日本ロボット学会学術講演会, Sep. 2008
- 丹羽治彦, 小鷹研理, 坂本義弘, 大竹正海, 金森道, 菅野重樹: スードライトを用いたDGPSによる屋内測位システム ―屋内と屋外のシームレス測位実現に向けて―, ロボティクス・メカトロニクス講演会 2008, Jun. 2008
- 丹羽治彦, 小鷹研理, 坂本義弘, 大竹正海, 金森道, 菅野重樹: マルチチャネルスードライトによるGPSに基づいた室内測位システム, 第8回計測自動制御学会システムインテグレーション部門講演会(SI 2007), Dec. 2007
- 菅野重樹, 丹羽治彦, 小鷹研理, 坂本義弘, 大竹正海, 金森道: GPSによるロボット制御, GPS/GNSSシンポジウム2007, Nov. 2007
- 丹羽治彦, 小鷹研理, 坂本義弘, 大竹正海, 金森道, 菅野重樹: マルチチャネルスードライトによるGPSに基づいた室内測位システム, 第25回日本ロボット学会学術講演会, Sep. 2000
- 坂本義弘, 大竹正海, 菅野重樹: スードライトとRFIDを用いた屋内ロボットナビゲーション手法の提案, 第7回システムインテグレーション部門講演会 (SI 2006), 2B2-3, 計測自動制御学会, Dec. 2006.
雑誌論文
- Kenjiro FUJII, Hiroaki ARIE, Wei WANG, Yuto KANEKO, Yoshihiro SAKAMOTO, Alexander SCHMITZ, and Shigeki SUGANO, “Improving IMES Localization Accuracy by Integrating Dead Reckoning Information,” Sensors, Vol.16, Issue 2, 2016
- Kenjirou FUJII, Yoshihiro SAKAMOTO, Wei WANG, Hiroaki ARIE, Alexander SCHMITZ, and Shigeki SUGANO, “Hyperbolic Positioning with Antenna Arrays and Multi-Channel Pseudolite for Indoor Localization,” Sensors, Vol.15, Issue 10, 2015
- Yoshihiro Sakamoto, Kenri Kodaka, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with a Movable Receiver Antenna for High-Accuracy IMES Localization”, Vol.5, No.5, pp.259-267, 2012.
- 坂本義弘, 菅野重樹: GPS互換技術を利用した人とロボットのための屋内外シームレス測位, Vol.51, No.6, pp.512-517, 2012.
- Shigeki Sugano, Yoshihiro Sakamoto, Kenjiro Fujii, Ivan G. Petrovski, Makoto Ishii, Kazuki Okano, and Seiya Kawaguchi, “It’s a Robot Life”, GPS World, Vol. 18, pp. 48-55, Sep. 2007
過去に所属していたメンバー
- 金子 雄人
- 米澤 遼亮
- 山口 翔貴
- 十時 惟
- 秦 昊
- 丹羽 治彦
- 大竹 正海