最適な機械動作の計画・実行
研究テーマ
計算機により機械動作を最適化して、最短時間動作や最小エネルギー動作などを計画できれば、機械作成コストや機械運用コストが大きく削減できます。本プロジェクトでは、任意に与えられた運動方程式から最適動作を計算するソルバを作成しています。
研究概要
ロボットに代表される機械が物理法則に支配された身体の特徴を最大限に生かして最適な動作を行うためには動作を記述する運動モデル(例えば運動方程式)から最適動作を導くという非線形最適化問題を解く必要があります。しかしこの問題は数学的には非常に難しく解が得られる目処がありません。しかし近年のコンピュータ技術の発達により近似計算というアプローチでこの問題が解けるようになってきました。そこで我々は多くの機械に対応した最適動作計算・実行システムを構成するために理論と応用の両面から研究を進めています。我々の最新のシステムは従来比で3000倍程度高速に動作を計算できるようになり3~4自由度の機械に対する準最適動作を数秒から数分で計算することができました。時間をかければ6自由度程度の機械についても計算ができ計算速度精度共に世界一だと言えます。当グループではこのプロジェクトの他にリズムを介した人間機械間インタラクションも扱っています。
最適動作計算ソルバ(2010年~)
本研究の一部はホンダ・リサーチ・インスティチュート・ジャパン(HRI-JP)との共同研究です。
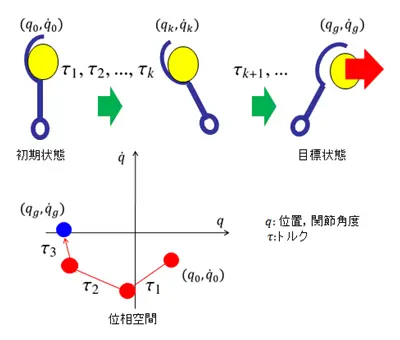
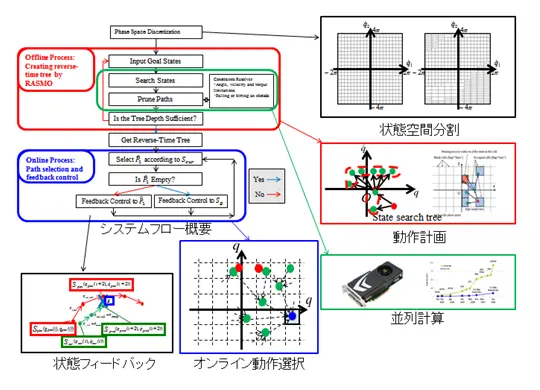
機械が持つ運動状態は位置(関節角度を含む)と速度(関節角速度を含む)で記述できます。位置と速度が同じであれば機械状態も等しいので機械の動作は位置と速度の軸を持つ位相空間上に一本の線として描くことができます。本研究ではこの位相空間上において機械の初期状態から目標状態までを結ぶ最適動作(経路)の計算を扱っています。この最適動作は具体的には最短時間動作やエネルギー最小動作などです。我々が構成した最適動作計算ソルバは下図のフローに従って計算を実行します。状態空間分割部では状態空間をいくつものセルに分割し似た機械状態の検索を高速化します。動作計画部では状態空間全体に均等な探索を行うとともに最適性の低い動作を切り捨てる枝刈りという計算を行います。これらのプロセスは並列計算機GPUに実装されており1024基の計算コアで同時に計算ができます。動作計画部が終わるとソルバが計算した準最適動作がデータベースに蓄えられ次は実際の機械制御に移ります。オンライン動作選択部では外乱によって乱されたそれぞれの機械状態から目標状態までの適切な動作をデータベースから検索し常に準最適動作を保証します。状態フィードバック部ではオンライン動作選択部が探した準最適動作を実現するための微細な制御を行います。
三平研(東工大)と実験を行った投球運動
本ソルバを用いることで約65km/h というベストレコードを達成しました(従来は約50km/h)。
- リンク(準備中)
6自由度倒立振子
6つの直列した振り子を小さな力だけで振り上げる動作について準最短時間動作の計算に成功しました。
- リンク(準備中)
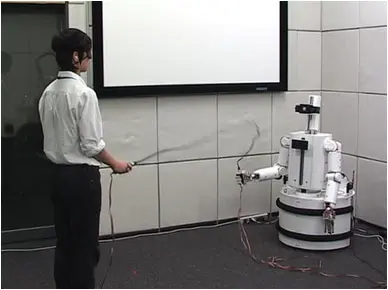
リズムを介した人間機械間インタラクション(2009年~)
人間とロボットの間で協調作業を行うためにはリズムの共有が欠かせません。しかしながら一般的な協調場面において人間がどのようなリズムに着目をするのかまたはロボットがどのようなリズムを提示するべきなのかについては研究が進んでおらず協調作業を困難なものとしています。そこで我々は大縄回しのタスクを例にリズム伝達に関わる情報の流れについての研究を行なっています。大縄回しを行う際には力覚視覚聴覚といった多くのモダリティに関わるリズムが生じます。人間はこれらのリズムの中からどのように縄を回すリズムを選択しているのかさらにロボットはどのようなリズムを提示すればうまく協調が行えるのかについて工学的・心理学的観点から調査を進めています。
成果・発表(学会発表・論文等)
特許
- 金天海: ”軌道計画方法、軌道計画システム及びロボット,” 特願:2010-274005,特開:2011-161624.
- 金天海,辻野広司,中原裕之: ”学習制御ステム及び学習制御方法,” 出願番号:2009-141680,特開:2010-287131.
- 辻野広司,金天海,米倉健太: ”操作端制御システム及び操作端制御方法,” 特願:2009-125841,特開:2010-269091.
- 金天海,辻野広司,中原裕之: “学習制御システム及び学習制御方法,” 特願:2009-217454,特開:2011-065553.
- 金天海,辻野広司,米倉健太: “操作端制御システム及び操作端制御方法,” 特願:2009-212499,特開:2011-56199.
- 菅野重樹,金天海,尾形哲也: ”情報処理システムおよび情報処理方法、並びにプログラム,”特願:2004-363742,特開:2006-172141,PCT / JP2005 / 21062.
受賞
- 金 天海,尾形哲也,菅野重樹: “自己組織化回路素子(SONE)への教師あり学習の付与,”情報処理学会全国大会, (2007), (学生奨励賞).
国際学会
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Online Motion Selection for Semi-Optimal Stabilization using Reverse-Time Tree,” in Proceedings of the IEEE International Conference on Intelligent Robots and Systems, (2011).
- Chyon Hae Kim, Keisuke Nakamura, Hiroshi Tsujino, Shigeki Sugano: “Semi-optimal Motion Control for Nonholonomic Systems with a Passive Joint,”in Proceedings of the SICE Annual Conference, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Rapid Approximation for Optimal Paths in Phase Space,” IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2011).
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “Rhythmic Reference of a Human while a Rope Turning Task,”ACM/IEEE International Conference on Human-Robot Interaction, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, Hiroyuki Nakahara: “Learning Attentive-Depth Switching While Interacting with an Agent,” in Proceedings of the IEEE/SICE International Symposium on System Integration, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, and Hiroyuki Nakahara: “Decoupling MDPs Step by Step from a POMDP,” Autonomous Robots and Multirobot Systems, (2011).
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “Physical Human-Robot Cooperation using Musical Rhythm,”IEEE/RSJ International Conference on Intelligent Robots and Systems, (2010).
- Chyon Hae Kim, Kenta Yonekura, Hiroshi Tsujino, and Shigeki Sugano: “Physical Control of the Rotation Center of an Unsupported Object -Rope Turning by a Humanoid Robot-,”IEEE-RAS International Conference on Humanoid Robots, pp.148-153, (2009).
- Kenta Yonekura, Chyon Hae Kim, Shigeki Sugano, and Hiroshi Tsujino: “A Robot Taking Lead in Rope Turning Task”, IEEE Young Reseachers Workshop, pp.9, (2009).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Enhancement of Self Organizing Network Elements for Supervised Learning,” In proceeding of IEEE International Conference on Robotics and Automation, (2007).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Efficient Organization of Network Topology based on Reinforcement Signals,” In proceeding of IEEE International Conference on Intelligent Robots and Systems, (2006).
- Chyon Hae Kim, Jyun-ichi Idesawa, Tetsuya Ogata, and Shigeki Sugano: “Improvement against Noises in Self-Organizing Logic Circuit,”In proceeding of IEEE International Conference on Information Acquisition, (2006).
- Chyon Hae Kim, Tetsuya Ogata, Shigeki Sugano: “Self-Organizing Algorithm for Logic Circuit based on Local Rules,” In proceeding of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2005).
国内学会
- 山崎翔太,金天海,辻野広司,菅野重樹: “状態遷移先の分散を最小化した状態空間量子化手法,”人工知能学会全国大会, (2011).
- 金天海,辻野広司,菅野重樹: “逆時間方向探索木を用いた準最適安定化制御,”ロボティクス・メカトロニクス講演会,(2011).
- 山崎翔太,金天海,辻野広司,菅野重樹: “準最適運動計画のための機械モデルに応じた位相空間分割手法,” ロボティクス・メカトロニクス講演会,(2011).
- 金天海,菅原志門,辻野広司,菅野重樹: “GPU及び位相空間分割を用いた準最適機械運動高速探索手法,” 計算工学講演会論文集, (2011).
- 金天海,菅原志門,辻野広司,菅野重樹: “準最適時間機械運動探索のための低計算オーダによる位相空間上探索木枝刈り手法,” 情報処理学会全国大会,(2011).
- 金天海,菅原志門,辻野広司,菅野重樹: “機械・環境の境界条件を考慮した位相空間上時間最適軌道計画手法,” 計測自動制御学会SI部門講演会,(2010).
- 米倉健太,金天海,中臺一博,辻野広司,菅野重樹: “歌唱によるリズム提示を用いた人・ロボット間協調作業,” ロボット学会学術講演会, (2010).
- 金天海,菅原志門,辻野広司,菅野重樹: “RPPPSとノイズキャンセルを用いた動作計画システム,”ロボット学会学術講演会, (2010).
- 金天海,辻野広司: “位相空間分割による高速枝刈り・軌道計画アルゴリズム,”ロボティクス・メカトロニクス講演会,(2010).
- 金天海,辻野広司,中原裕之: “マルチエージェントタスクを考慮した二階層型強化学習,” 人工知能学会全国大会,(2010).
- 米倉健太,金天海,菅野重樹,辻野広司: “多自由度アームの大縄回し制御則に関する速度限界を考慮した解析,”計測自動制御学会システムインテグレーション部門講演会,(2009).
- 金天海, 米倉健太, 辻野広司, 菅野重樹: “不支持物体に対する仮想円を用いたエネルギー伝達制御 -ヒューマノイドロボットを用いた大縄回し-,” ロボット学会学術講演会, 2009
- 菊池大輔,笠井栄良,金天海,岩田浩康,菅野重樹: “なじみを備えた多指ロボットハンドにおける手指姿態・触覚情報の汎化学習に基づく操り動作の安定化,” ロボット学会学術講演会, (2009).
- 金天海,辻野広司,中原裕之: “他者の状態予測を用いた階層型強化学習,” ロボット学会学術講演会,(2009).
- キムマーガレット,金天海,竹内誉羽,辻野広司: “A Stepwise Training Method for Complex Task Solving Using Reinforcement Learning,”人工知能学会全国大会,(2008).
- 金 天海,阿部博行,出澤純一,尾形哲也,菅野重樹: “自己組織化回路素子SONEの制御回路構造形成メカニズム,”ロボティクス・メカトロニクス講演会,(2008).
- 金 天海,出澤純一,尾形哲也,菅野重樹: “自己組織化回路素子へのフリップフロップ素子導入による時系列学習,”人工知能学会全国大会,(2007).
- 金 天海,尾形哲也,菅野重樹: “自己組織化回路素子(SONE)への教師あり学習の付与,”情報処理学会全国大会, (2007), (学生奨励賞).
- 金 天海,尾形哲也,菅野重樹: “自己組織化回路素子SONEへの教師あり学習機能の付与,”計測自動制御学会システムインテグレーション部門講演会, 2006.
- 出澤純一,金 天海,尾形哲也,菅野重樹: “自己組織化回路素子SONEにおけるフリップフロップ素子導入によるシーケンスの分節化と統合,” 計測自動制御学会システムインテグレーション部門講演会,(2006).
- 金 天海,出澤純一,尾形哲也,菅野重樹: “自己組織化論理回路における対ノイズ性能の向上,” 日本ロボット学会学術講演会,(2006).
- 出澤 純一,金 天海,尾形 哲也,菅野 重樹: “自己組織化ネットワーク素子群における対ノイズ性能向上,”ロボティクス・メカトロニクス講演会,(2006).
- 金 天海,尾形哲也,菅野重樹: “自己組織化論理回路における学習アルゴリズムの解析,” 計測自動制御学会システムインテグレーション部門講演会,(2005).
- 金 天海,尾形哲也,菅野重樹: “ローカルルールに基づいた論理回路の自己組織化アルゴリズム,” 計測自動制御学会システムインテグレーション部門講演会,(2004).
雑誌論文
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “A Role of Multi-Modal Rhythms in Physical Interaction and Cooperation,” EURASIP Journal on Audio, Speech, and Music Processing, (2012), Accepted.
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Rapid Short-Time Path Planning for Phase Space,” Journal of Robotics and Mechatronics, Vol. 23, No. 2, pp.271-280, (2011).
- Chyon Hae Kim, Kenta Yonekura, Hiroshi Tsujino, and Shikgei Sugano: “Physical Control of the Rotation of a Flexible Object – Rope Turning with a Humanoid Robot,” Advanced Robotics, Vol. 25, No. 3, pp. 491-506, (2011).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Reinforcement Signal Propagation Algorithm for Logic Circuit,”Journal of Robotics and Mechatronics, Vol.20, No.5, pp.757-774, (2008).
- 金天海,出澤純一,尾形哲也,菅野重樹: ”自己組織化論理回路におけるノイズの抑制,” 日本ロボット学会誌,Vol.25 No.6,2007.
- 金天海,尾形哲也,菅野重樹: ”ローカルルールに基いた論理回路の自己組織化アルゴリズム,” 計測自動制御学会論文誌,Vol.42 No.4 pp.334-341,2006.
過去に所属していたメンバー
- 菅原 志門
- 山崎 翔太
- 米倉 健太
- 出澤 純一
- 阿部 博明