産業応用班
研究概要
本研究では、ディープラーニングとビジョンベースのモデルを活用したロボットアームによるケーブル配線手法を提案し、ケーブル配索自動化における重要な課題に取り組む。深層学習モデルを用いることで、本システムは視覚情報と関節角度を同時に処理し、リアルタイムな認識と適応的な動作経路計画を実現する。視覚データは RealSense カメラによって取得され、ロボットアームが作業環境を正確に解釈し、ケーブル操作に関連する主要な特徴を抽出できるようにする。
マルチモーダルデータに対して、深層学習によりセンサ情報を統合し、動作予測と経路の動的調整が可能となり、配線中のケーブル変形の問題を解決する。異なるケーブル本数、色、動作速度など多様なシナリオにおける実験評価により、本モデルは複雑な環境下でも優れた予測精度とロバスト性を目指す。
研究提案では配線効率と安定性を大幅に向上させるとともに、故障検出と自動修復機能も行えることを目指している。本研究は、産業オートメーションおよび柔軟な材料取り扱いの分野に貢献するものであり、将来の展望としてモデル性能のさらなる最適化、実験条件の拡張、自動組立システムへの応用範囲の拡大を目指す。
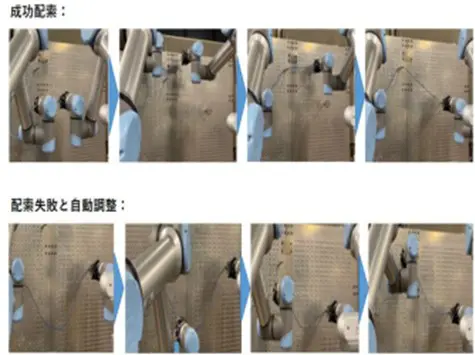
成功配索、配索失敗と自動調整の様子
成果・発表(学会発表・論文等)
国内学会
- 趙浩宇,船橋賢,楊斯程,三宅太文,王語詩,簡培峻,横田平志,月田裕樹(矢崎総業),松本治,尾形哲也,菅野重樹,“SARNN を用いた深層学習によるロボットアームの配索動作の自動修正の実現”,日本機械学会, ROBOMECH2025, 1A1-M04.