WAMOEBA Group
Research Theme
―Will robots develop minds?
To tackle this grand theme, we have divided the mind into three functions: intelligence, emotion, and willingness. We have focused our research on the emotion aspect. Through numerous thought experiments and analogies between living organisms and robots, we developed WAMOEBA (Waseda Artificial Mind On Emotion BASE).
Research Overview
Self-preservation evaluation function and hormone parameters
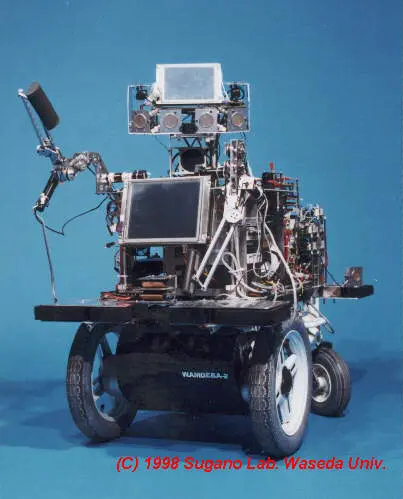
(WAMOEBA-2 1998-present)
Rather than introducing a human psychological model established through introspection or verification using living organisms, we hoped to develop an emotional expression that would be in line with the robot’s own physical characteristics, and instead introduced the “law of self-preservation,” a basic principle of living organisms. By emotional expression, we mean emotional expressive behavior, such as blushing or breaking out into a sweat when nervous, or the bristling of a cat’s fur when it encounters a natural enemy.
Emotional Expression Robot “WAMOEBA-2”
- Battery voltage (remaining charge)
- Battery current
- Circuit temperature
- Motor temperature
In addition to movement and camera operation, a cooling fan is also installed to promote self-preservation.
Self-Preservation Evaluation Function
For each sensor used to measure self-preservation status, we defined a “self-preservation evaluation function” that evaluates the robot’s own self-preservation. The self-preservation evaluation function is a fuzzy membership function that takes the absolute value and first derivative of each sensor as input and outputs a dimensionless normalized value called the “self-preservation value.” The larger this value, the worse the self-preservation status and the more dangerous it is.
Take battery voltage as an example. A voltage value close to a full charge reduces the self-preservation evaluation value, but if it approaches the PC’s minimum operating voltage, the self-preservation evaluation value rises sharply. We also defined a voltage higher than a full charge as an overcharge, resulting in a higher evaluation value.
When combining the self-preservation evaluation values for all sensor inputs, the largest value is selected and used as the robot’s self-preservation evaluation value.
Hormone Parameters
To enable emotional expression using the robot’s body, we defined “hormone parameters.” Hormone parameters are parameters that affect the control of each part, mimicking the endocrine system of living organisms. They are defined using the absolute and differential values of the self-preservation evaluation.
WAMOEBA-2 has four hormone parameters in total. They are secreted and decay (decomposed) over time in response to increases, decreases, and absolute values of the self-preservation evaluation. We named these parameters “R-endorphin,” “R-adrenaline,” “R-noradrenaline,” and “R-dopamine,” respectively. The control parameters for each part’s degree of freedom are then adjusted according to their levels.
For example, a high level of R-endorphin will increase the pitch of the robot’s speech, and secreting R-adrenaline will increase the rotation speed of the cooling fan.
WAMOEBA-2’s Emotional Expression
The self-preservation evaluation function and hormone parameter mechanisms enable WAMOEBA to express emotions in accordance with its own physical state. For example, if the motor temperature rises during exploration behavior, the robot suppresses motor function and circulates excess current to the cooling fan. This may make WAMOEBA appear tired to an observer, and, in human or animal terms, appear to be sweating.
In this way, the WAMOEBA project demonstrated that emotional expression is possible through physical movements, even without using specific emotional parameters determined by the designer’s subjective judgment.
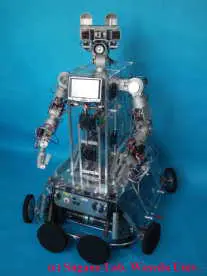
Adaptive Interaction Using Interactive Evolutionary Computation
(WAMOEBA-3, 2002-present)
In response to this, we introduced interactive evolutionary computation (IEC) as a method for deriving parameters appropriate for the robot’s body and the environment, including the human it communicates with. IEC refers to an evolutionary computation method, such as genetic algorithms, that uses human subjective evaluation as the fitness function.
In this research, using WAMOEBA-3 as a platform, we coded the robot’s behavioral parameters into genes, and conducted experiments in which we operated the robot using the parameters written in many different genes and evaluated its movements.
Problems with Adaptive Interaction
We found that adaptive interaction using interactive evolutionary computation (IEC) increased evaluation scores during the first few hours of learning, but then decreased them from the middle stage onward. This was due to boredom caused by physical and mental fatigue in the evaluators, leading to a shift in the evaluation axis, causing existing favorable genes to receive lower evaluations.
Reducing Evaluator Fatigue through Hybrid Evaluation
In evolutionary computation, maintaining diversity within the gene pool is considered effective in responding to dynamically changing evaluations. Possible ways to maintain diversity within the gene pool are to increase the number of individuals or the mutation rate. However, in IEC, increasing the number of individuals increases the number of evaluations required by the evaluators, which increases their physical fatigue. Furthermore, increasing the mutation rate reduces the learning convergence rate, which may also lead to subject boredom.
In contrast, in this study, genes were analyzed and discriminated using a self-organizing map, which suppressed the evaluation of similar genes and reduced fatigue among the evaluators, while also increasing the number of individuals in the gene pool, thereby successfully maintaining high evaluation values in the middle of the experiment.
Outcomes and Presentations (Conference Presentations, Publications, etc.)
International Conference
- Shunsuke Nagahama, Yousuke Kimura, Chyon Hae Kim, Shigeki Sugano, The Development of Magnetic Powdery Sensor, IEEE SENSORS2014, pp.783-786, 2014
- Shunsuke Nagahama, Shotaro Iida, Chyon Hae Kim, and Shigeki Sugano, “Signal transmission with magnetic powdery wire in a pipeline”, Proceeding of the IEEE International Conference on Robotics and Biomimetics (ROBIO2013), pp.1113-1118, 2013.
- Chyon Hae Kim, Yuki Nishi, Syunsuke Nagahama, Shigeki Sugano, “Finding and Utilizing Self-preserving Functions in Blood Pulsation -Development for Ethanol Based Artificial Circulation System-“, , pp.pp.1034-1039, 2012.
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Enhancement of Self Organizing Network Elements for Supervised Learning” IEEE International Conference on Robotics and Automation,2007
- Yuki SUGA, Chihiro ENDO, Da izo KOBAYASHI, Takeshi MATSUMOTO, Tetsuya OGATA, Shigeki SUGANO, Adaptive Human-Robot Interaction System using Interactive EC, in Proceeding of IEEE/RSJ International Conference on Intelligent Robots and Syst ems (IROS2006), Oct. 2006
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Efficient Organization of Network Topology based on Reinforcement Signals”, IEEE International Conference on Intelligent Robots and Systems, 2006
- Chyon Hae Kim, Jyun-ichi Idesawa, Tetsuya OGATA, Shigeki SUGANO:”Improvement against Noises in Self-Organizing Logic Circuit”, IEEE International Conference on Information Acquisition, 2006
- Yuki SUGA, Tesuya OGATA, Sh igeki SUGANO, Evolutionary Approach for Designing the Behavior Generator of Communication Robot, in Proc eeding of SICE/CICCA Joint Conference, Oct. 2006
- Yuki SYGA, Yoshinori Ikuma, Daisuke Nagao, Tetsuya OGATA, and Shigeki SUGANO, Interactive Evolution of Human-Robot Communication in Real World, in Proceeding of IEEE/RSJ Interanational Conference on Intelligent Robots and Systems (IROS2005), August, 2005
- Chyon Hae Kim, Tetsuya OGATA, Shigeki SUGANO:”Self-Organizing Algorithm for Logic Circuit based on Local Rules”, Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, 2005
- Yuki SUGA, Hiroaki ARIE, Tetsuya OGATA, and Shigeki SUGANO, ”Constructivist Approach to Human-Robot Emotional Communication: Design of Evolutionary Function for WAMOEBA-3″ in Proceeding of IEEE/RAS Interanational Conference on Humanoid Robots (Humanoids 2004), No.76, Nov. 2004
- Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO: ”Development of Emotional Communication Robot, WAMEOAB-3″ in Proceeding of the 4th International Conference of Advanced Mechatronics (ICAM 04), pp413-418, Oct., 2004
- Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, ”Acquisition of Reactive Motions for Communication Robots using Interactive EC”in Proceeding of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2004) , pp.1198-1203, Sept., 2004
- Yusuke AKIWA, Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, ”Imitation based Human-Robot Interaction -Roles of Joint Attention and Motion Prediction-” in Proceeding of the 2004 IEEE International Conference of Human Robot Interactive Communication (ROMAN 2004), pp.283-288,Sept., 2004
- Tetsuya OGATA, Noritaka MASAGO, Shigeki SUGANO, and Jun TANI, “Interactive Learning in Human-Robot Collaboration” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2003), pp.162-167, Oct. 2003
- Kuniaki NODA, Mototaka SUZUKI, Naofumi TSUCHIYA, Yuki SUGA, Tetsuya OGATA and Shigeki SUGANO, “Robust Modeling of Dynamics Environment based on Robot Embodiment” in Proc. of IEEE International Conference on Robotics and Automation (ICRA 2003), Sept. pp.3565-3570, 2003
- Tetsuya?OGATA, Noritaka MASAGO, Shigeki SUGANO, and Jun TANI, “Collaboration Development through Interactive Learning between Human and Robot” in Proc. of 3rd International Workshop on Epigenetic Robotics, pp. 99-106, Aug. 2003
- Yasuhisa HAYAKAWA, Tetsuya OGATA, and Shigeki SUGANO, “Flexible Assembly Work Cooperation based on Work State Identifications by a Self-Organizing Map” in Proc. of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2003), pp. 1031-1036, July 2003
- Tetsuya OGATA, Takaaki KOMIYA, Kuniaki NODA, and Shigeki SUGANO, “Influence of the Eye Motions in Human-Robot Communication and Motion Generation based on the Robot Body Structure” in Proc. of IEEE/RAS International Conference on Humanoid Robots (Humanoid 2001), pp. 83-89, Nov. 2001
- Tetsuya OGATA, Takaaki KOMIYA, and Shigeki SUGANO, “Motion Generation of the Autonomous Robot based on Body Structure” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2001), pp. 2338-2343, Oct.2001
- Tetsuya OGATA, Yoshihiro MATSUYAMA, Takaaki KOMIYA, Masataka IDA, Kuniaki NODA, and Shigeki SUGANO, “Development of Emotional Communication Robot: WAMOEBA-2R -Experimental Evaluation of the Emotional Communication between Robots and Humans-” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’2000), Oct., pp. 175-180, Nov. 2000
- Tetsuya OGATA, Takaaki KOMIYA and Shigeki SUGANO, “Development of Arm System for Human-Robot Emotional Communication,” in Proc. of IEEE International Conference on Industrial Electronics, Control and Instrumentation (IECON 2000), pp.475-480, Oct. 2000
- Tetsuya OGATA, Akitoshi SHIMURA, Koji SHIBUYA and Shigeki SUGANO, “A Violin Playing Algorithm Considering the Change of Phrase Impression,” in Proc. of IEEE International Conference on Systems, Man, and Cybernetics (SMC’2000), pp.1342-1347, Oct. 2000
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Robot: WAMOEBA-2R – Emotion Model and Evaluation Experiments-,” in Proc. of IEEE/RAS International Conference on Humanoid Robots (Humanoid 2000), paper no.93, Sept. 2000
- Tetsuya OGATA and Shigeki SUGANO, “The adaptive motion by the endocrine system model in an autonomous robot,” in Proc on International Symposium on Adaptive Motion of Animals and Machines, paper no. E30, August, 2000
- Yasuhisa HAYAKAWA, Tetsuya OGATA, and Shigeki SUGANO, “A Robotic Co-operation System based on a Self-organization approached Human Work Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’2000), pp.4058-4063, April, 2000
- Tetsuya OGATA, Yasuhisa HAYAKAWA, Kensuke SATAKE, and Shigeki SUGANO, “Analysis of Design Process by the Observation of Human Motion,” in Proc. of International Workshop on Emergent Synthesis (IWES’99), pp.167-172,Dec. 1999.
- Yasuhisa HAYAKAWA, Yusuke KIRA, Tetsuya OGATA, and Shigeki SUGANO, “Extraction of Human Intention for Human Co-operating Systems -Prototype Assembling Work Support Robot System according to Human Intention-” in Proc. of International Conference on Advanced Robotics (ICAR’99), pp. 199-204, Oct. 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Between Humans and Robots – Consideration of Primitivee Language in Robots -, ” in Proc. of IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS’99), pp. 870-875, Oct., 1999.
- Tetsuya OGATA, Takaaki KOMIYA and Shigeki SUGANO, “Human Robot Communication by Physical Interaction – Distributed Agent Control System and The Learning Algorithm -” in Proc. of IEEE International Conference on Systems, Man, and Cybernetics (SMC’99), pp.1005-1010, Oct. 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Communication Between Humans and the Autonomous Robot Which Has the Emotion Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’99),pp.3177-3182, May, 1999.
- Tetsuya OGATA and Shigeki SUGANO, “Emergence of Primitive Verbal Communication in Robots,” in Proc. of 5th International Conference on Soft Computing and Information / Intelligent Systems (IIZUKA’98), pp.284-287, Oct. 1998.
- Tetsuya OGATA and Shigeki SUGANO, “Communications Between Behavior-Based Robot with Emotion Model and Human,” in Proc. IEEE International Conference on Systems, Man, and Cybernetics (SMC’98), pp.1095-1100, Oct. 1998.
- Tetusya OGATA and Shigeki SUGANO, “Mechanisums of Internal Secretion System for Intellectual Robots -Towards an Emergence of Emotion in Robots, ” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’98), pp.50-55, Oct. 1998.
- Tetsuya OGATA and Shigeki SUGANO, “Emotional Behavior Adjustment System in Robots,” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’97), pp.352-357, Oct. 1997.
- Tetsuya OGATA, Kazuki HAYASHI, Ikuo KITAGISHI and Shigeki SUGANO, “Generation of Behavior Automaton on Neural Network,” in Proc. of IEEE-RSJ International Conference on Intelligent Robot and Systems (IROS’97), Vol.3, pp.608-613, Sept. 1997.
- Tetsuya OGATA and Shigeki SUGANO, “Mechanical System for Autonomic Nervous System in Robots,” in Proc. of IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM’97), PaperNo.113, Jun. 1997.
- Tetsuya OGATA and Shigeki SUGANO, “Sense Syncretic Model toward the Construction of ‘Robot-Original-Language’,” in Proc. of IEEE International Workshop on Robot and Human Communication (ROMAN’96), pp.433-438, 1996.
- Shigeki SUGANO and Tetsuya OGATA, “Emergence of Mind in Robots for Human Interface – Research Methodology and Robot Model,” in Proc. of IEEE International Conference on Robotics and Automation (ICRA’96), pp.1191-1198, 1996.
- Ichiro.KATO, “Homini-Robotism,” in Proc. of IEEE International Conference on Advanced Robotics (ICAR’91), pp.1-5, 1991.
Domestic Conference
- Kayo Migita, Shunsuke Nagahama, Yosuke Kimura, Shigeki Kanno, “Proposal of a Wear Repair Mechanism by Metal Electrodeposition,” ROBOMECH2015, May 2015
- Shunsuke Nagahama, Shigeki Kanno, “Proposal of a Self-Repairing and Self-Sustaining System for Robots Using Material Supply from an Artificial Circulatory System,” 24th Biomechanism Symposium, July 2015
- Shunsuke Nagahama, Yosuke Kimura, Tenkai Kim, Shigeki Kanno: Magnetic Powdery Repair System by Material Supply Development of a Sensor, 35th Annual Conference on Biomechanisms, pp. 59-62, 2014
- Yosuke Kimura, Shunsuke Nagahama, Shigeki Kanno: Study on the Impression of Humans Affected by a Robot Performing Eating Action, 28th Annual Conference of the Japanese Society for Artificial Intelligence, 2014, pp. 2J1-1, 2014
- Hiroki Yoneyama, Shunsuke Nagahama, Shotaro Iida, Shigeki Kanno: Proposal of a Material Transport Method for Mechanical Systems with Self-Repair and Maintenance Using Materials, Proceedings of the 2014 JSME Conference on Robotics and Mechatronics (Robomec’14), pp. 3A1-K02, 2014
- Yosuke Kimura, Kayo Migita, Shunsuke Nagahama, Tenkai Kim, Shigeki Kanno : Proposal of a repair method for worn areas in sliding parts of mechanical systems, 15th Conference of the System Integration Division of the Society of Instrument and Control Engineers, 634-637 (1H4-5), 2014
- Shunsuke Nagahama, Yuki Nishi, Tenkai Kin, Shigeki Kanno: Development of a multifunctional integrated circulatory system mimicking the functions of the living body, Robotics and Mechatronics Conference 2012 (ROBOMEC2012), 1A2-Q07, 2012.
- Shunsuke Nagahama, Yumiko Yamazaki, Tenkai Kin, Shigeki Kanno: Evaluation of cognitive evaluation of mind transfer between objects and robots, Human Interface Symposium 2012, pp. 187-190, 2012.
- Shunsuke Nagahama, Yuki Nishi, Tenkai Kin, Shigeki Kanno: Promotion of self-repair and suppression of filter clogging by pulsation in circulatory systems, 30th Annual Conference of the Robotics Society of Japan, 1I2-8, 2012.
- Kin Amami, Yamazaki Yumiko, Nagahama Shunsuke, and Sugano Shigeki: “Where Do People Perceive Agent Boundaries? Controlling Agent Boundary Recognition in Human-Robot Interaction,” JAWS2012, 2012.
- Kin Amami, Ogata Tetsuya, and Sugano Shigeki: “Implementing Supervised Learning in Self-Organizing Network Elements (SONE)” (Student Encouragement Award), Information Processing Society of Japan, 69th National Convention, 2007.
- Idezawa Junichi, Kin Amami, Ogata Tetsuya, and Sugano Shigeki: “Improving Noise Tolerance in Self-Organizing Network Elements,” Robotics and Mechatronics Conference, 2006.
- Kin Amami, Ogata Tetsuya, and Sugano Shigeki: “Implementing Supervised Learning in Self-Organizing Network Elements (SONE),” 7th SICE System Integration Division Conference, 2006
- Junichi Idezawa, Amami Kin, Tetsuya Ogata, Shigeki Kanno: Sequence Segmentation and Integration by Introducing Flip-Flop Elements in the Self-Organizing Circuit Element SONE, 7th SICE System Integration Division Conference, 2006
- Amami Kin, Junichi Idezawa, Tetsuya Ogata, Shigeki Kanno: Improvement of Noise Tolerance in Self-Organizing Logic Circuits, 24th Annual Meeting of the Robotics Society of Japan, 2006
- Amami Kin, Tetsuya Ogata, Shigeki Kanno: Analysis of Learning Algorithms in Self-Organizing Logic Circuits, 6th SICE System Integration Division Conference, 2005
- Amami Kin, Tetsuya Ogata, Shigeki Kanno: Self-Organizing Algorithms for Logic Circuits Based on Local Rules, 5th Conference of the Society of Instrument and Control Engineers, System Integration Division, 2004
- Takaaki Komiya, Kuniaki Noda, Naofumi Tsuchiya, Tetsuya Ogata, and Shigeki Kanno: Motion Generation by Whole-Body Coordination Using Distributed Agents, JSME Robotics and Mechatronics Conference, 2P1-D06, June 2002
- Masami Otake, Yoshihiro Sakamoto, Tetsuya Ogata, and Shigeki Kanno: Human-Robot Communication Based on Imitation, JSME Robotics and Mechatronics Conference, 1P1-K03, June 2002
- Kuniaki Noda, Masataka Ida, Tetsuya Ogata, and Shigeki Kanno: Communication between Humans and Robots with State Expression Functions Based on Embodiment, JSME Robotics and Mechatronics Conference, 1P1-D10, June 2001
- Tetsuya Ogata and Shigeki Kanno: Integration of Robot Structure and System for Emotional Expression Generation, JSME SI Symposium, 2000 December (Presentation Schedule)
- Tetsuya Ogata, Shigeki Sugano: Robot Structure for Emotional Communication and Autonomous Behavior Generation, 6th IFToMM Conference Symposium, pp. 14-17, November 2000
- Tetsuya Ogata, Akitoshi Shimura, Itaru Uno, Tsuneji Shibuya, Shigeki Sugano: Construction of a Violin Playing Algorithm Considering Phase Impression Changes, 21st Annual Conference of the Society of Biomechanisms, pp. 173-176, November 2000
- Tetsuya Ogata, Yoshihiko Matsuyama, Takaaki Komiya, Masataka Ida, Kuniaki Noda, Shigeki Sugano: Experimental Study on Communication between Humans and Autonomous Robots: System Design and Cross-Population Comparison of Psychological Evaluation, 18th Annual Conference of the Robotics Society of Japan, pp. 479-480, September 2000
- Tetsuya Ogata, Yoshihiko Matsuyama, Takaaki Komiya, Masataka Ida, Kuniaki Noda, Shigeki Sugano: Development of the Autonomous Robot WAMOEBA-2R: Arm System Installation and Psychological Experiments, JSME Robotics and Mechatronics Conference, 1A1-80-114, May 2000.
- Yasuhisa Hayakawa, Kensuke Satake, Nobuhiro Uchida, Tetsuya Ogata, Shigeki Kanno: Study on a Task State Model Generation Method Applicable to Unknown Task Support, 5th Robotics Symposia, pp. 260-265, March 2000.
- Tetsuya Ogata, Yoshihiko Matsuyama, Takaaki Komiya, Masataka Ida, Kuniaki Noda, Shigeki Kanno: Development of the Emotionally Interactive Robot WAMOEBA-2R: System Configuration and Evaluation Experiments, 5th Robotics Symposia, pp. 68-73, March 2000.
- Yasuhisa Hayakawa, Nobuhiro Uchida, Kensuke Satake, Tetsuya Ogata, Shigeki Kanno: Human-Robot Interaction Manipulator Assisted Behavior Generation Based on Interaction Analysis, 20th Annual Conference of the Society of Biomechanisms, pp. 380-381, November 1999.
- Yasuhisa Hayakawa, Kensuke Satake, Tetsuya Ogata, Shigeki Sugano: Symbolization and Analysis of Assembly Tasks Based on Observation of Body Movements, 17th Annual Conference of the Robotics Society of Japan, pp. 1067-1068, September 1999.
- Tetsuya Ogata, Takaaki Komiya, Shigeki Sugano: Physical Communication between Humans and Robots – Development of an Arm System and Behavior Acquisition by Distributed Agents, 17th Annual Conference of the Robotics Society of Japan, pp. 423-424, September 1999.
- Tetsuya Ogata, Kiyoshi Nito, Takaaki Komiya, Noritaka Matsumoto, Shigeki Sugano: Emotionally Interactive Robot Development of the Wamoeba-2 Arm-Hand Mechanism: Motion Generation by Distributed Agents, JSME Conference on Robotics and Mechatronics, 2P2-79-103, June 1999.
- Yasuhisa Hayakawa, Yusuke Kira, Kensuke Satake, Nobuhiro Uchida, Tetsuya Ogata, and Shigeki Kanno: Extraction of Implicit Intentions by Structuring Head and Hand Positions and Grasping Information, JSME Conference on Robotics and Mechatronics, 2A1-76-118, June 1999.
- Tetsuya Ogata, Yoshihiko Matsuyama, and Shigeki Kanno: Emotional Interaction between Robots and Humans: Considerations of Pre-Language Emergence in Robots, 4th Robotics Symposia, pp. 44-49, March 1999 (Peer Reviewed).
- Yasuhisa Hayakawa, Yusuke Kira, Tetsuya Ogata, and Shigeki Kanno: Development of a System for Assembly Task Support “Study on Construction of Synthesis Models: Structuring Using Time-Series Neural Networks Based on Assembly Operation Information,” Proceedings of the JSPE Spring Meeting, p. 534, March 1999.
- Tetsuya Ogata, Yasuhisa Hayakawa, Yusuke Kira, and Shigeki Kanno: “Extraction and Modeling of Human Synthesis Activities: A Study Using Human-Machine Collaboration Systems,” Proceedings of the 2nd Waseda-Keio University Research Meeting on the Science of Human-Oriented Synthesis, JSPS Future Development Program, pp. 70-73, December 1998.
- Tetsuya Ogata and Shigeki Kanno: “Hormonal System Models in Robots and Their Effects: Body Control and Environmental Adaptation,” 19th Annual Meeting of the Society of Biomechanisms, pp. 71-72, November 1998.
- Tetsuya Ogata, Yasuhisa Hayakawa, and Shigeki Kanno: “Structure of Assembly Task Support Systems: Interpretation of Human-Oriented Synthesis,” JSME Design Engineering and Systems Division Conference, pp. 169-170, November 1998
- Sugano, Shigeki: Functions and Forms Necessary for Emotional Communication, Proceedings of the 76th Annual Conference of the Japan Society of Mechanical Engineers, Vol. 4, pp. 284-285, October 1998
- Ogata, T., Matsuyama, Y., Otsuka, T., and Sugano, Shigeki: Pre-linguistic Expressions and Communication in Robots, Proceedings of the 16th Annual Conference of the Robotics Society of Japan, pp. 645-646, September 1998
- Ogata, T., Nito, K., and Sugano, Shigeki: Sensory-Behavioral Maps and Their Application to Behavioral Planning in Robots, Proceedings of the 16th Annual Conference of the Robotics Society of Japan, pp. 429-430, September 1998
- Ogata, T., Otsuka, T., and Sugano, Shigeki: Emotional Models and Internal Representation Acquisition Models Based on Robot Embodiedness, Proceedings of the 16th Annual Conference of the Robotics Society of Japan, 2CII4-3, June 1998
- Tetsuya Ogata, Takumi Otsuka, Shigeki Sugano: Emotional Expression and Evaluation Experiments Using Autonomous Robot Models, JSME Robotics and Mechatronics Conference, 2BII1-6, June 1998
- Tetsuya Ogata and Shigeki Sugano: Emotional Interaction between Robots and Humans: Effects of Autonomous Robot Models and Trial Experiments, 3rd Robotics Symposia, pp. 41-46, May 1998 (Peer-reviewed)
- Tetsuya Ogata and Shigeki Sugano, “Acquisition of Holophrastic Speech in Autonomous Robots – Toward the Emergence of Verbal Communication in Robots -,” Toward a Science of Consciousness “Tucson III,” Paper No. 250, April 1998 (Peer-reviewed)
- Shigeki Sugano, Tsuneji Shibuya, Tetsuya Ogata: Mental Communication in Human-Coexisting Robots Communication, Proceedings of the IEEJ National Convention, S.18-21-S.18-25, March 1998.
- Sugano, Shigeki, Shibuya, Tsuneji, Ogata, Tetsuya: Emotional Interaction Experiments between the Behavior-Based Autonomous Robot WAMOEBA-2 and Humans, Proceedings of the 3rd Symposium on Priority Research Areas “Intelligent Robots,” pp.149-152, January 1998.
- Ogata, Tetsuya, Sugano, Shigeki: Mental Language Processing for Synthesis, Proceedings of the 1st Waseda-Keio University Results Report Session of the Japan Society for the Promotion of Science’s Future Development Program, Science of Human-Oriented Synthesis, pp.9-10, December 1997.
- Ogata, Tetsuya, Kawabata, Kuniaki, Fujii, Teruo, Asama, Hajime, Endo, Isao, Sugano, Shigeki: Heterogeneous Robots Interaction Experiments between Bots, Proceedings of the 15th Annual Meeting of the Robotics Society of Japan, Vol. 3, pp. 833-834, September 1997.
- Teruo Fujii, Yoshiki Ishida, Yoji Kuroda, Yasuharu Kunii, Shigeki Kanno, Hideki Hashimoto: Robot Systems as Physical Media on the Internet, Proceedings of the 15th Annual Meeting of the Robotics Society of Japan, Vol. 3, pp. 823-824, September 1997.
- Tetsuya Ogata, Takami Otsuka, Shigeki Kanno: Acquisition of Expressions for Conversation with Humans by an Autonomous Robot, Proceedings of the 15th Annual Meeting of the Robotics Society of Japan, Vol. 2, pp. 397-398, September 1997.
- Tetsuya Ogata, Shigeki Kanno: Generation of Autonomous Emotional Reactions in a Robot, Proceedings of the 15th Annual Meeting of the Robotics Society of Japan, Vol. 2, pp. 385-386, September 1997.
- Tetsuya OGATA and Shigeki SUGANO, “Emergence of emotional expression of robots based on the internal secretion system,” The Brain and Self Workshop: Toward a Science of Consciousness, Paper No. 61, August 1997 (peer-reviewed).
- Sugano Shigeki and Ogata Tetsuya: Mental Communication between Humans and Machines, Proceedings of the SICE Academic Conference, pp. 1327-1328, August 1997.
Journal
- Shunsuke Nagahama, Shotaro Iida, Hiroki Yoneyama, Shigeki Sugano, “Method to obtain only targeted substances from an artificial circulatory system,” IFToMM World Congress 2015, DOI Number:10.6567/IFToMM.14TH.WC.OS1.019, pp.91-95, 2015
- Amami Kim, Junichi Idezawa, Tetsuya Ogata, Shigeki Sugano: “Noise suppression in self-organizing logic circuits,” Journal of the Robotics Society of Japan, Vol. 25, No. 6, (2007) *Coming Soon*
- Shigeki Sugano, Tetsuya Ogata: Research on communication by robots – Emotional communication robot WAMOEBA -, Journal of the Robotics Society of Japan, Vol. 24, No. 6, pp. 688-691, September 2006
- Mototaka Suzuki, Kuniaki Noda, Yuki Suga, Tetsuya Ogata, and Shigeki SUGANO: Dynamic Perception after Visually-Guided Grasping by a Human-Like Autonomous Robot, Advanced Robotics, VSP and Robotics Society of Japan, Vol. 20, No. 2, pp. 233-254, February 2006
- KIN Tianhai, OGATA Tetsuya, and SUGANO Shigeki: Self-Organizing Algorithm of Logical Circuits Based on Local Rules, Transactions of the Society of Instrument and Control Engineers, Vol. 42, No. 4, April 2006
- OGATA Tetsuya, and SUGANO Shigeki: Experimental Evaluation of Emotional Communication between Humans and Robots – Physical Interaction with Humans Using Arm-Hand, Transactions of the Institute of Systems, Control and Information Engineers, Vol. 13, No. 12, pp. 566-574, 2000
- Tetsuya OGATA, Yoshihiro MATSUYAMA, and Shigeki SUGANO: Acquisition of the Internal Representation in Robots – Toward the Human-Robot Communication Using the Primitive Language, The International Journal of the Robotics Society of Japan (Advanced Robotics), Vol.14, No.4, pp.277-291, 2000
- Tetsuya OGATA and Shigeki SUGANO: Emotional Communication between Humans and the Autonomous Robot WAMOEBA-2 (Waseda Amoeba) Which has the Emotion Model, JSME International Journal, Series C: Mechanical Systems Machine Elements and Manufacturing, Vol.43, No.3, pp. 568-574, Sept. 2000.
- Yasuhisa HAYAKAWA, Ikuo KITAGISHI, Yusuke KIRA, Kensuke SATAKE, Tetsuya OGATA, and Shigeki SUGANO: An Assembling Support System based on a Human Model -Provision of Physical Support According to Implicit Desire for Support, Journal of Robotics and Mechatronics, Vol.12, No.2, pp. 118-125, 2000
- MechanoCreatures, edited by the Japan Society of Mechanical Engineers, Corona Publishing, April 2003 (Chapter 7)
- Tetsuya OGATA and Shigeki SUGANO: Consideration of Emotion Model and Primitive Language of Robots, FLSI-Vol. 3 “What should be computed to understand and model brain function? -From Robotics, Soft Computing, Biology and Neuroscience to Cognitive Philosophy-”, World Scientific Publishing Co., March 2001
- Tetsuya OGATA and Shigeki SUGANO: Communication between Robots and Humans Based on Embodiment, bit Special Edition “Embodiment and Computers”, edited by Michio Okada, Hiroyuki Mishima, and Masato Sasaki, Kyoritsu Shuppan, pp. 195-207, August 2000
Past members
- Kayo Migita
- Kazuki Zuharic
- Mitsuki Sato
- Yudai Ishikawa
- Tetsuya Ogata
- Tenkai Kane
- Tokushi Nakao
- Junichi Tanabe
- Daiki Yoneyama
- Hiroaki Honma
- Yosuke Kimura
- Shotaro Iida
- Yuki Nishi
- Hiroaki Ariye
- Junichi Idezawa
- Chihiro Endo
- Daizo Kobayashi
- Takaharu Suzuki
- Takeru Matsumoto
- Daijiro Iwamaru
- Kinya Okada
- Kyojiro Okude
- Ryota Suzuki
- Hiroyuki Abe
- Ken Iizuka
- Tetsuro Endo
- Hiroki Kondo
- Tokuo Sakagami
- Shota Miyake
- Hiroki Honma
- Yuki Suga