Sensor Group
Research Theme
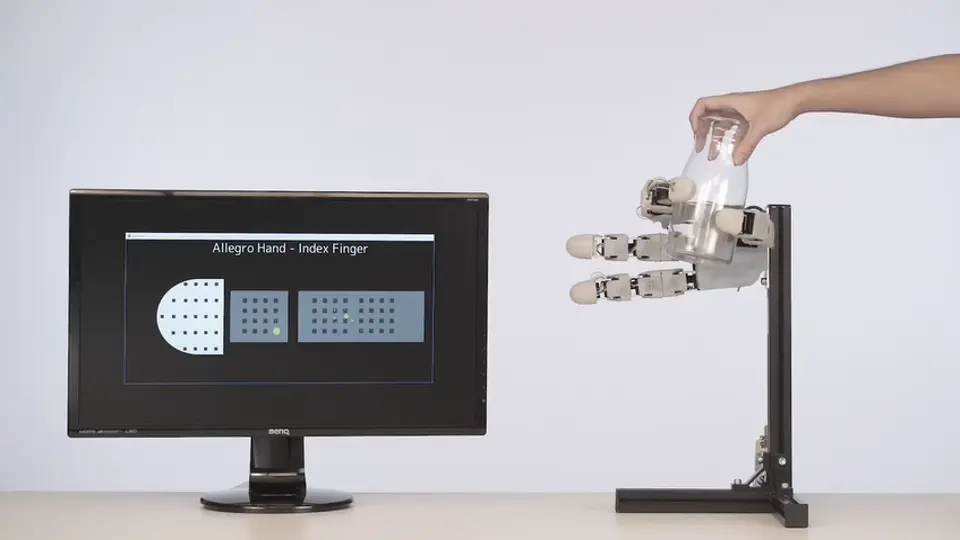
Development of Distributed Skin Sensors for Collaborative Robots
Research Overview
The sensor team develops distributed skin sensors for collaborative robots. The skin for robot hands enables distributed 3-axis force measurements with minimal wiring. A spin-off is xelarobotics.com. The group currently implements stretchable wires and liquid filled sensors for enhanced sensing characteristics. The tactile sensors can be used for weight detection, slip detection, and various other tasks. The skin for robot arms detects the proximity of humans and enables safe-human robot interaction.