Remote Operation & Disaster Response Group
Research Theme
Field Robot Infinite Natural Walking Device
Research Overview
Field Robot
In the wake of natural disasters such as the Great East Japan Earthquake, there is a growing need for effective disaster response operations. However, disaster sites often present numerous hazards, including piles of rubble, radiation contamination, and collapsed buildings, making it dangerous for humans to carry out such operations. To address this issue, disaster response robots are expected to take the place of human workers.
In response to this need, we have developed a highly articulated disaster response robot called OCTOPUS. This robot features four arms and four flippers, enabling it to climb over obstacles using its arms and perform complex tasks with all four limbs. Two types of OCTOPUS have been developed: a hydraulic-powered model and an electric-powered model.
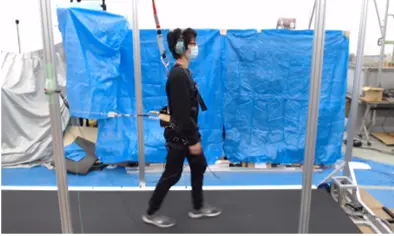
Infinite Natural Walking Device
To enable users to walk indefinitely with a natural sensation similar to walking on flat ground, we are developing an omnidirectional natural walking device composed of a treadmill and a wire-pulling system. Our research also includes impedance estimation during walking to further enhance the naturalness and responsiveness of the device.