Positioning for robots
Research Theme
Positioning technology is fundamental for mobile robots. Our goal in this research is to achieve cm- to dm-level positioning accuracy both indoors and outdoors by using GPS-compatible positioning techniques.
Research Overview
Positioning and navigation technology is a very important technology in the field of robotics. GPS is the de facto standard as an outdoor positioning infrastructure, but there is no prominent method for indoor positioning, although a lot of methods have been proposed. If positioning technology that is compatible with GPS can also be used in indoor environments, it will enable seamless indoor-outdoor positioning with a single receiver. This will reduce the cost of the device and make using it more convenient. In this project, we are investigating an indoor messaging system (IMES) and pseudolites as GPS-compatible indoor positioning techniques, and are conducting research on their application to robot navigation.
High-accuracy IMES with Doppler positioning (2010 -)
The concept of indoor messaging system (IMES) was devised by Japan Aerospace Exploration Agency (JAXA) for location-based services. An IMES is composed of simple transmitters that transmit the position information assigned to each transmitter by modulating it on a GPS-compatible signal. However, unlike GPS, a receiver of IMES does not use trilateration to determine its position; instead, it simply decodes the position information (namely, the transmitter’s position) from the incoming signal and regards it as the receiver’s position. Accordingly, the positioning accuracy equals the installation interval of transmitters (normally 10 to 20 m). This accuracy is sufficient for services for humans, but for robot navigation, at least decimeter-level positioning accuracy is necessary.
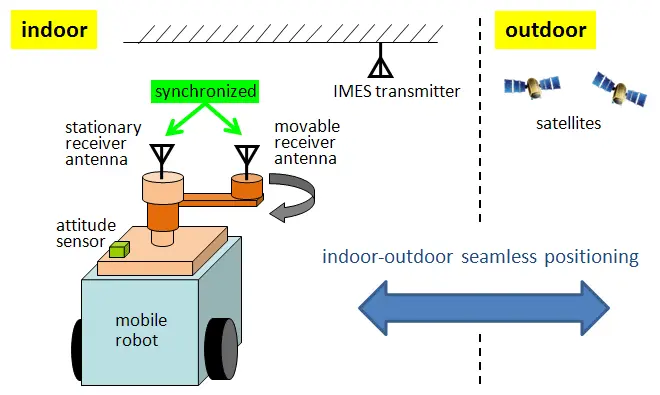
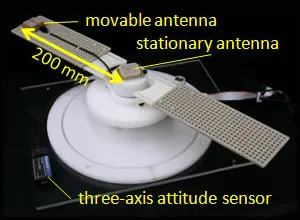
We have proposed a “Doppler positioning method” in our project to achieve high-accuracy IMES localization (Fig. 1). Doppler shifts of a carrier wave (produced by moving a receiver antenna) and the three-axis attitude of the receiver are used to derive observation equations; we then solve the equations using a least squares method or a Kalman filter to determine the receiver’s position.
Pseudolites (2005 – 2009)
Outcomes and Presentations (Conference Presentations, Publications, etc.)
International Conference
- Kenjiro FUJII, Takamasa KAWAGUCHI, Hisanori MATSUMOTO, Makoto TANIKAWARA, Takashi TOYAMA, Yoshihiro SAKAMOTO, Wei WANG, Hiroaki ARIE, Alexander SCHMITZ, Shigeki SUGANO, “Methods for Improving IMES Transmitters: Transmission Diversity, Variable Beamwidth Antenna, and Leaky Coaxial Cable,” In Proc. of the 2015 IEEE/SICE International Symposium on System Integration (SII2015), Nagoya, Japan, Dec. 2015
- Kenjiro FUJII, Wei WANG, Yuto KANEKO, Yoshihiro SAKAMOTO, Hiroaki ARIE, and Shigeki SUGANO, “Accurate indoor positioning using IMES radio,” In Proc. of the IEEE International Conference on Mechatronics and Automation (ICMA), pp. 1966 ? 1971, Beijing, China, Aug. 2015
- Yoshihiro Sakamoto, Yui Totoki, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Indoor Positioning based on Difference between Carrier-phases Transmitted from Proximately-located Antennas of a Multi-channel Pseudolite”, Proc. of International Conference on Innovative Engineering (ICIES2012), 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with Orientation Estimation by Using Multiple Transmitters for High-accuracy IMES Localization”, Proc. of 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN2012), pp.presentation 111, 2012.
- Yoshihiro Sakamoto, Kenri Kodaka, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Active-localization methods for mobile robots in a coarsely structured environment with floor-embedded RFID tags and indoor GPS”, Proc. of 2012 IEEE International Conference on Mechatronics and Automation (ICMA2012), pp.539-545, 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “GPS-compatible Indoor-positioning Methods for Indoor-outdoor Seamless Robot Navigation”, Proc. of 2012 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO2012), pp.95-100, 2012.
- Yoshihiro Sakamoto, Takuji Ebinuma, Kenjirou Fujii, and Shigeki Sugano, “Real-time Indoor Positioning with a Single IMES Transmitter and a Rotation-type Doppler Measurement Unit”, International Global Navigation Satellite Systems (IGNSS) 2011 (incorporating the International Symposium on GPS and GNSS), Nov. ,2011.
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “High-Accuracy IMES Localization Using a Movable Receiver Antenna and a Three-axis Attitude Sensor,” 2011 International Conference on Indoor Positioning and Indoor Navigation, Sep. 2011
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Initial Value Analysis of a Nonlinear Least-Square Method for Indoor Doppler Positioning with a Single Pseudolite,” SICE Annual Conference 2011, Sep. 2011
- Yoshihiro Sakamoto, Hiroaki Arie, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with a Movable Receiver Antenna and a Single Pseudolite for Indoor Localization,” 2011 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2011), pp.19-24, Jul. 2011
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Multiplexing Receivers to Improve Positioning Success Rate for Pseudolite Indoor Localization”, 7th International Symposium on Mechatronics and its Application (ISMA2010), CD-ROM, April, 2010
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Pseudolite Indoor Localization Using Multiple Receivers – Performance Analysis of Increasing Receivers and Transmitters -“, 2010 International Conference on Indoor Positioning and Indoor Navigation (IPIN2010), CD-ROM, September, 2010
- Yoshihiro Sakamoto, Haruhiko Niwa, Takuji Ebinuma, Kenjiro Fujii, Shigeki Sugano, “Indoor Positioning with Pseudolites”, SICE Annual Conference 2010, CD-ROM, August, 2010
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Takuji Ebinuma, and Shigeki Sugano, “Indoor GPS Receiver for Mobile Robot” Proc. of International Symposium on GPS/GNSS 2008(GNSS 2008), Nov. 2008.
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Takuji Ebinuma, and Shigeki Sugano, “Indoor GPS and Receiver for Robot Navigation – Seamless Positioning between Indoor and Outdoor Space -” Proc. of International Conference on Ubiquitous Robots and Ambient Intelligence (URAI 2008), Nov. 2008
- Haruhiko Niwa, Kenri Kodaka, Yoshihiro Sakamoto, Masaumi Otake, Seiji Kawaguchi, Kenjirou Fujii, Yuki Kanemori, and Shigeki Sugano, “GPS-based Indoor Positioning system with Multi-Channel Pseudolite” Proc. of IEEE-RAS International Conference on Robots and Automation (ICRA 2008), May 2008.
Journal
- Kenjiro FUJII, Hiroaki ARIE, Wei WANG, Yuto KANEKO, Yoshihiro SAKAMOTO, Alexander SCHMITZ, and Shigeki SUGANO, “Improving IMES Localization Accuracy by Integrating Dead Reckoning Information,” Sensors, Vol.16, Issue 2, 2016
- Kenjirou FUJII, Yoshihiro SAKAMOTO, Wei WANG, Hiroaki ARIE, Alexander SCHMITZ, and Shigeki SUGANO, “Hyperbolic Positioning with Antenna Arrays and Multi-Channel Pseudolite for Indoor Localization,” Sensors, Vol.15, Issue 10, 2015
- Yoshihiro Sakamoto, Kenri Kodaka, Takuji Ebinuma, Kenjiro Fujii, and Shigeki Sugano, “Doppler Positioning with a Movable Receiver Antenna for High-Accuracy IMES Localization”, Vol.5, No.5, pp.259-267, 2012.
- Shigeki Sugano, Yoshihiro Sakamoto, Kenjiro Fujii, Ivan G. Petrovski, Makoto Ishii, Kazuki Okano, and Seiya Kawaguchi, “It’s a Robot Life”, GPS World, Vol. 18, pp. 48-55, Sep. 2007
Past members
- Yuto Kaneko
- Yonezawa Ryosuke
- Shoki Yamaguchi
- Yui Totoki
- Qin Hao
- Haruhiko Niwa
- Masaumi Otake