Optimal motion planning for machines
Research Theme
This research project is centered on a motion optimization system that is applicable to general machines. The developed optimization system realizes the most appropriate balance of precision, optimality, and computational cost among planning systems throughout the world.
Research Overview
To realize optimal motion that effectively uses body specifications governed by physical laws, machines including robots need to solve a non-linear motion optimization problem that depends on their motion model (e.g. motion equations). For this problem, algebraic mathematics cannot provide a solution. However, the recent advances in computer technology make it possible to tackle the problem using approximation techniques. We are making progress in theory and application research to formulate and develop optimal motion planning solver and execution systems. Our recent system achieved 3,000 times faster optimization. As a result, it can solve 3 to 4 degrees of freedom (DoF) link semi-optimal motions within several seconds or minutes. It has also realized 6-DoF-link optimization. These results indicate that the calculation speed and precision of our system are the best in the world. Our group is also researching “rhythmic interaction between machines and humans.”
Motion Optimization Solver (2010-)
Part of this research is a collaboration with Honda Research Institute Japan.
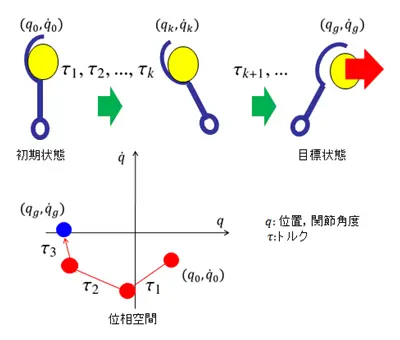
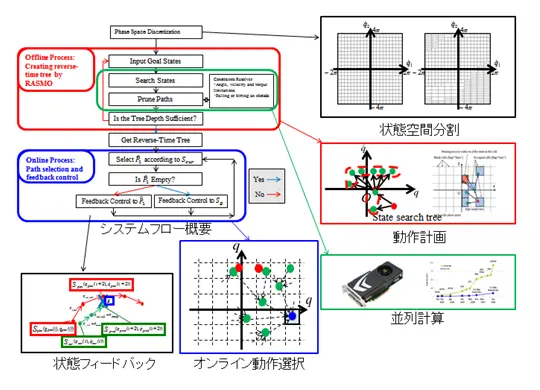
A typical machine state is defined as the pair consisting of position (including angular position) and velocity (including angular velocity). We can describe a motion as a line in the state space (equal to the phase space) of a machine. This research deals with the calculation for the optimal path that connects the initial and goal states in the state space. The optimal criteria include the shortest time and the minimum energy. The optimal motion planning solver that we developed executes its calculation as the flow shown in the bottom figure. The solver partitions the state space into many cells in order to find similar states more quickly. The planning part of the solver prunes the branches of a tree according to an optimality criterion. This process is implemented as a code for parallel processing of a GPU board. After the planning part, the semi-optimal motions that were obtained by the solver are stored in a database, and then actual mechanical control is executed. The online motion selection part searches for the best motion from the database according to the current state of the machine. The state feedback part assures a local feedback control that realizes the selected semi-optimal motions.
Throwing experiment done with Sampei Lab. at Tokyo Institute of Technology
We used this solver in an experiment done with a throwing machine; the machine achieved a record-best 65 km/h (about 50 km/h previously).
- link (in preparation)
Swinging up motion for sixth inverted pendulum
We succeeded in calculating the semi-optimal motion for a six degree of freedom inverted pendulum.
- link (in preparation)
Rhythmic Human Robot Interaction (2009-)
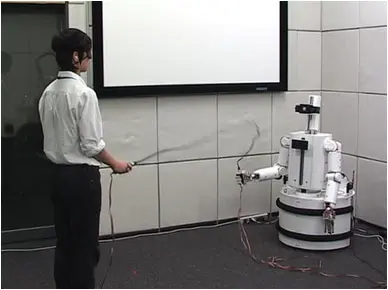
Rhythmic cooperation is an important concept in robots that work with humans. However, research has not yet been done on what rhythms humans focus on or what rhythms a robot should provide to the human. We are now researching the rhythmic information flow between a human and a robot using a cooperative rope-turning task, as shown in the photo. This cooperative task involves information sensing for three kinds of modalities: vision, audition, and force. We are exploring from the viewpoint of engineering and psychology how a human selects a rope-turning rhythm and how a robot should cooperate.
Outcomes and Presentations (Conference Presentations, Publications, etc.)
International Conference
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Online Motion Selection for Semi-Optimal Stabilization using Reverse-Time Tree,” in Proceedings of the IEEE International Conference on Intelligent Robots and Systems, (2011).
- Chyon Hae Kim, Keisuke Nakamura, Hiroshi Tsujino, Shigeki Sugano: “Semi-optimal Motion Control for Nonholonomic Systems with a Passive Joint,”in Proceedings of the SICE Annual Conference, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Rapid Approximation for Optimal Paths in Phase Space,” IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2011).
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “Rhythmic Reference of a Human while a Rope Turning Task,”ACM/IEEE International Conference on Human-Robot Interaction, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, Hiroyuki Nakahara: “Learning Attentive-Depth Switching While Interacting with an Agent,” in Proceedings of the IEEE/SICE International Symposium on System Integration, (2011).
- Chyon Hae Kim, Hiroshi Tsujino, and Hiroyuki Nakahara: “Decoupling MDPs Step by Step from a POMDP,” Autonomous Robots and Multirobot Systems, (2011).
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “Physical Human-Robot Cooperation using Musical Rhythm,”IEEE/RSJ International Conference on Intelligent Robots and Systems, (2010).
- Chyon Hae Kim, Kenta Yonekura, Hiroshi Tsujino, and Shigeki Sugano: “Physical Control of the Rotation Center of an Unsupported Object -Rope Turning by a Humanoid Robot-,”IEEE-RAS International Conference on Humanoid Robots, pp.148-153, (2009).
- Kenta Yonekura, Chyon Hae Kim, Shigeki Sugano, and Hiroshi Tsujino: “A Robot Taking Lead in Rope Turning Task”, IEEE Young Reseachers Workshop, pp.9, (2009).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Enhancement of Self Organizing Network Elements for Supervised Learning,” In proceeding of IEEE International Conference on Robotics and Automation, (2007).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Efficient Organization of Network Topology based on Reinforcement Signals,” In proceeding of IEEE International Conference on Intelligent Robots and Systems, (2006).
- Chyon Hae Kim, Jyun-ichi Idesawa, Tetsuya Ogata, and Shigeki Sugano: “Improvement against Noises in Self-Organizing Logic Circuit,”In proceeding of IEEE International Conference on Information Acquisition, (2006).
- Chyon Hae Kim, Tetsuya Ogata, Shigeki Sugano: “Self-Organizing Algorithm for Logic Circuit based on Local Rules,” In proceeding of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, (2005).
Journal
- Kenta Yonekura, Chyon Hae Kim, Kazuhiro Nakadai, Hiroshi Tsujino, and Shigeki Sugano: “A Role of Multi-Modal Rhythms in Physical Interaction and Cooperation,” EURASIP Journal on Audio, Speech, and Music Processing, (2012), Accepted.
- Chyon Hae Kim, Hiroshi Tsujino, and Shigeki Sugano: “Rapid Short-Time Path Planning for Phase Space,” Journal of Robotics and Mechatronics, Vol. 23, No. 2, pp.271-280, (2011).
- Chyon Hae Kim, Kenta Yonekura, Hiroshi Tsujino, and Shikgei Sugano: “Physical Control of the Rotation of a Flexible Object – Rope Turning with a Humanoid Robot,” Advanced Robotics, Vol. 25, No. 3, pp. 491-506, (2011).
- Chyon Hae Kim, Tetsuya Ogata, and Shigeki Sugano: “Reinforcement Signal Propagation Algorithm for Logic Circuit,”Journal of Robotics and Mechatronics, Vol.20, No.5, pp.757-774, (2008).
Past members
- Shimon Sugawara
- Syota Yamazaki
- Kenta Yonekura
- Jun-ichi Idesawa
- Hiroaki Abe