Cognition and learning for robots
Research Theme
Learning from its own experiences is an important ability for robots working in a complex daily environment. The goal of this study is to describe the essential mechanism of developing cognitive abilities through the robot’s own sensory-motor experiences.
Research Overview
Learning from their own experience is an important ability for robots working in a complex daily environment. We attempt to describe the essential mechanism of developing cognitive abilities through the robot’s own sensory-motor experience. To achieve this, we are conducting interdisciplinary studies by taking a synthetic approach in experiments on neural network modeling and robotics.
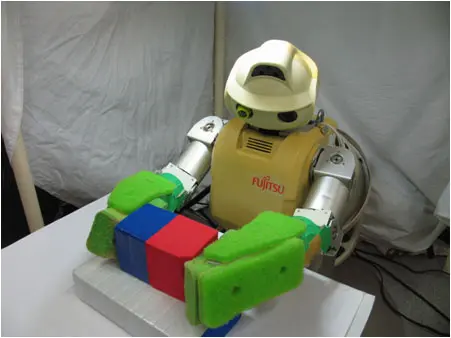
Integrating Object Manipulation Behaviors into the Attractor Dynamics (2005 – )
We are exploring the problems of symbols and behavior generation. Although in conventional cognitive science, symbol representations and their manipulations are assumed as a priori, a crucial question is to what degree such symbol systems can be realized in neuronal dynamical systems. It is also important to ask how they can be acquired as grounded to sensory-motor experiences. We are investigating these problems by taking a synthetic approach using neural network modeling and robotics experiments.
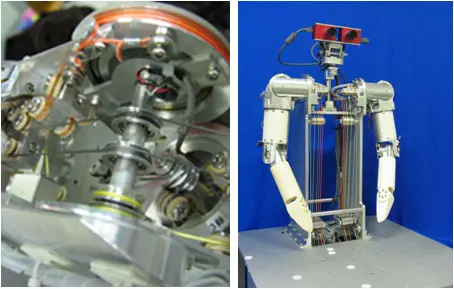
Developmental Learning of Motor Control System (2005 – 2008)
Humans learn skilled behavior through repetition of our own behavior experiences. From a brain science perspective, we speculate that such skilled behaviors might be acquired in the inferior parietal lobe through the repeated sensory-motor experiences, and we therefore propose a brain model. We utilized two neural networks in our study. One was a continuous time recurrent neural network (CTRNN), which learns the trajectory of joint angles to achieve the task. The other was a recurrent neural network (RNN), which learns the relation of muscle activity to joint angles. We tested the proposed model by applying it to the task of reaching for an object using a real robot with a tendon-based actuation mechanism.
Outcomes and Presentations (Conference Presentations, Publications, etc.)
International Conference
- Kuniyuki Takahashi, Kanata Suzuki, Tetsuya Ogata, Hadi Tjandra, Shigeki Sugano:”Efficient Motor Babbling Using Variance Predictions from a Recurrent Neural Network,” 22nd International Conference on Neural Information Processing (ICONIP2015), Lecture Notes in Computer Science, Accepted for Oral Presentation, Istanbul, Turkey, November 9th – 12th, 2015
- Kuniyuki Takahashi, Tetsuya Ogata, Hiroki Yamada, Hadi Tjandra, Shigeki Sugano:”Effective Motion Learning for a Flexible-Joint Robot using Motor Babbling,” 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, Hamburg(IROS2015), Germany, September 28th – October 2nd, 2015 (Acceptance rate 46%)
- Kazuma Sasaki, Hadi Tjandra, Kuniaki Noda, Kuniyuki Takahashi, Tetsuya Ogata: “Neural Network based Model for Visual-motor Integration Learning of Robot’s Drawing Behavior: Association of a Drawing Motion from a Drawn Image,” 2015 IEEE/RSJ International Conference on Intelligent Robots and System, Hamburg, Germany, September 28th – October 2nd, 2015 (Acceptance rate 46%)
- Kuniyuki Takahashi, Tetsuya Ogata, Hadi Tjandra, and Shigeki Sugano: “Tool-body Assimilation Model by Modulation of Body Schema,” Challenges of the First Year in Graduate Program for Embodiment Informatics, poster, Japan, January 13th, 2015
- Shingo Murata, Saki Tomioka, Ryoichi Nakajo, Tatsuro Yamada, Hiroaki Arie, Tetsuya Ogata, and Shigeki Sugano,?”Predictive Learning with Uncertainty Estimation for Modeling Infants’ Cognitive Development with Caregivers: A Neurorobotics Experiment,” In Proceedings of the Fifth Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob 2015), pp. 302-307, Providence, USA, 2015
- Shingo Murata, Yuichi Yamashita, Hiroaki Arie, Tetsuya Ogata, Jun Tani, and Shigeki Sugano,“Neuro-Dynamical Accounts for Postdiction,”?The 19th Annual Meeting of the Association for the Scientific Study of Consciousness (ASSC 19), Paris, France, 2015
- Kuniyuki Takahashi, Tetsuya Ogata, Hadi Tjandra, Shingo Murata, Hiroaki Arie, Shigeki Sugano, Tool-body Assimilation Model based on Body Babbling and a Neuro-dynamical System for Motion Generation, The?24th International Conference on Artificial Neural Networks (ICANN 2014),?Lecture Notes in Computer?Science, pp.363-370, 2014
- Kuniyuki Takahshi, Tetsuya Ogata, Hadi Tjandra, Yuki Yamaguchi, Yuki Suga, and Shigeki Sugano, Tool-body Assimilation Model using a Neuro-dynamical System for Acquiring Representation of Tool Function and Motion, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2014), pp.1255 – 1260, 2014
- Kuniyuki Takahashi, Tetsuya Ogata, Hadi Tjandra, and Shigeki Sugano: “Tool-body Assimilation Model by Modulation of Body Schema,” Italy-Japan Workshop 2014, poster, Japan, December 11th, 2014
- Kuniyuki Takahashi, Tetsuya Ogata, Hadi Tjandra, Yuki Yamaguchi, and Shigeki Sugano: “Tool-body Assimilation Model Based on Body Babbling and a Neurodynamical System for Representation of Tool Function,” Singapore-Japan Workshop for Young Robotics Researchers, poster, A-15, Singapore, March 5th-7th, 2014
- Shingo Murata, Jun Namikawa, Hiroaki Arie, Jun Tani, and Shigeki Sugano, “Learning to Reproduce Fluctuating Behavioral Sequences Using a Dynamic Neural Network Model with Time-Varying Variance Estimation Mechanism”, The Third Joint IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob 2013), 2013.
- Shingo Murata, Yuichi Yamashita, Tetsuya Ogata, Hiroaki Arie, Jun Tani, and Shigeki Sugano, “Altered Prediction of Uncertainty Induced by Network Disequilibrium: A Neuro-Robotics Study”, Computational Psychiatry 2013, 2013.
- Shingo Murata, Jun Namikawa, Hiroaki Arie, Jun Tani, and Shigeki Sugano, “Development of Proactive and Reactive Behavior via Meta-Learning of Prediction Error Variance”, The 20th International Conference on Neural Information Processing (ICONIP 2013), pp.537-544, 2013.
- Hiroaki ARIE, Tetsuro ENDO, Sungmoon JEONG, Minho LEE, Shigeki SUGANO, Jun TANI, “Integrative learning between language and action: a neuro-robotics experiment”, 20th International Conference on Artificial Neural Networks (ICANN2010), Sep. 2010
- Hiroaki ARIE, Tetsuro ENDO, Takafumi ARAKAKI, Shigeki SUGANO, Jun TANI, “A neuro-dynamical model for understanding mechanisms of goal-directed action”, The 3rd International Symposium on Mobiligence, pp46-51, Nov. 2009
- Hiroaki ARIE, Tetsuro ENDO, Takafumi ARAKAKI, Shigeki SUGANO, Jun TANI, “Creating Novel Goal-Directed Actions Using Chaotic Dynamics”, IEEE 8th International Conference on Development and Learning (ICDL2009), Jun. 2009
- Hiroaki ARIE, Tetsuro ENDO, Takafumi ARAKAKI, Shigeki SUGANO, Jun TANI, “Imaging and generating novel goal-directed behavior utilizing neuro-chaotic dynamics: a humanoid robotics experiment”,10th International Conference on the Simulation of Adaptive Behavior Last Minute Results,Jul. 2008
- Hiroaki ARIE, Shigeki SUGANO, Jun TANI, “Constructive Approach to Understanding the Active Learning Process of Adaptation within a Given Task Environment”, The 2nd International Symposium on Mobiligence, pp77-80, 2007
- Hiroaki ARIE, Jun NAMIKAWA, Tetsuya OGATA, Jun TANI, Shigeki SUGANO, “Reinforcement Learning Algorithm with CTRNN in Continuous Action Space, Lecture Notes in Computer Science”, 13th International Conference on Neural Information Processing, Vol.4232, pp.387-396, 2006
Domestic Conference
- Kuniyuki Takahashi, Tetsuya Ogata, Shigeki Sugano, Gordon Cheng : “Dynamic Motion Learning for a Flexible-Joint Robot using Active-Passive Motor Babbling, ” 第33回日本ロボット学会 学術講演会,2G1-07,東京,2015年9月3日-5日
- 陽品駒,高橋城志,尾形哲也,菅祐樹,菅野重樹:”RTC による深層学習モデルと柔軟関節ロボットの統合 ~道具身体化モデルの学習データ収集と動作実現~,” 第33回日本ロボット学会 学術講演会,3F3-06,東京,2015年9月3日-5日
Journal
- Shingo Murata, Yuichi Yamashita, Hiroaki Arie, Tetsuya Ogata, Shigeki Sugano, and Jun Tani, “Learning to Perceive the World as Probabilistic or Deterministic via Interaction with Others: A Neuro-Robotics Experiment,” IEEE Transactions on Neural Networks and Learning Systems, Published Online, pp. 1-19, 2015
- Kuniyuki Takahashi, Tetsuya Ogata, Hadi Tjandra, Yuki Yamaguchi, Shigeki Sugano, Tool-body Assimilation Model Based on Body Babbling and Neuro-dynamical System, Mathematical Problems in Engineering, Article ID 837540, 2014
- Shingo Murata, Jun Namikawa, Hiroaki Arie, Shigeki Sugano, and Jun Tani, “Learning to Reproduce Fluctuating Time Series by Inferring Their Time-dependent Stochastic Properties: Application in Robot Learning via Tutoring”, IEEE Transactions on Autonomous Mental Development, pp.298-310, 2013.
- Hiroaki ARIE, Takafumi ARAKAKI, Shigeki SUGANO, Jun TANI, “Imitating others by composition of primitive actions: a neuro-dynamic model”, Robotics and Autonomous Systems, Vol.60, pp.729-741
- Hiroaki ARIE, Tetsuro ENDO, Takafumi ARAKAKI, Shigeki SUGANO, Jun TANI, “Creating Novel Goal-Directed Actions at Criticality: A Neuro-Robotic Experiment”, New Mathematics and Natural Computation, Vol. 5, No. 1, pp. 307-334
- Hiroaki ARIE, Tetsuya OGATA, Jun TANI, Shigeki SUGANO, “Reinforcement learning of continuous motor sequence with hidden state”, Advanced Robotics, Vol. 21, No. 10, pp. 1215-1229
Invited Talk
- Kuniyuki Takahashi, Tetsuya Ogata, Shigeki Sugano, Gordon Cheng: “Motion Learning for a Flexible-Joint Robot using Active-Passive Motor Babbling,” French-Japanese-German Workshop on Human Centric Robotics, Poster(invited), Munich, Germany, 9th-10th June, 2015
- Kuniyuki Takahashi: “Effective Motion Learning of Flexible Joint Robot with Motor Babbling”, Technical University Munich, April 8th, 2015
- Kuniyuki Takahashi: “Tool-body Assimilation Model Based on Body Babbling and Neuro-dynamical System”, Technical University Munich, March 6th, 2014
- Kuniyuki Takahashi: “Tool-body Assimilation Model Based on Body Babbling and Neuro-dynamical System”, Technical University Munich, September 22th, 2014
Past members
- Mr. Kuniyuki Takahashi
- Ms.CHEN Yiwen
- Ms.LI Yuxi
- Mr.YANG PIN CHU
- Ms. Saki Tomioka
- Mr. Hiroki Yamada
- Mr. Tjandra Hadi
- Mr. Kaoru Ozaki
- Mr. Keishi Sugano
- Mr. Takafumi Arakaki
- Mr. Takeshi Iizuka
- Mr. Tetsuro Endo
- Mr. Takaharu Suzuki
Link
Related societies
- The International Neural Network Society (INNS)
- The International Society for Adaptive Behavior (ISAB)
- IEEE Computational Intelligence Society