Infrastructure maintenance and management Group
Research Theme
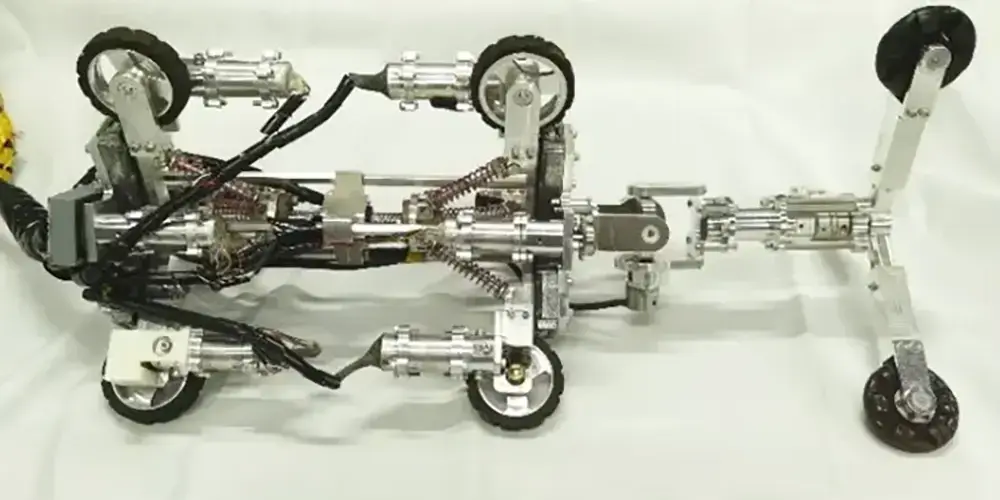
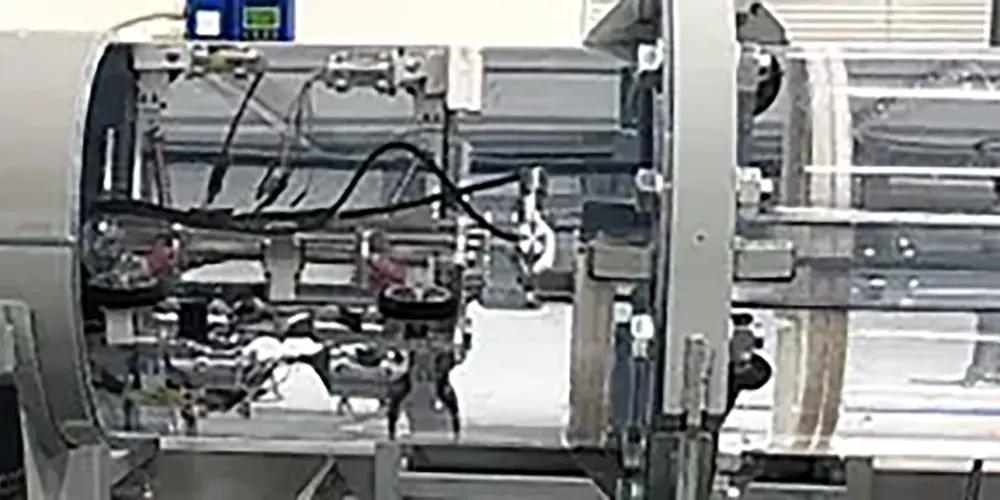
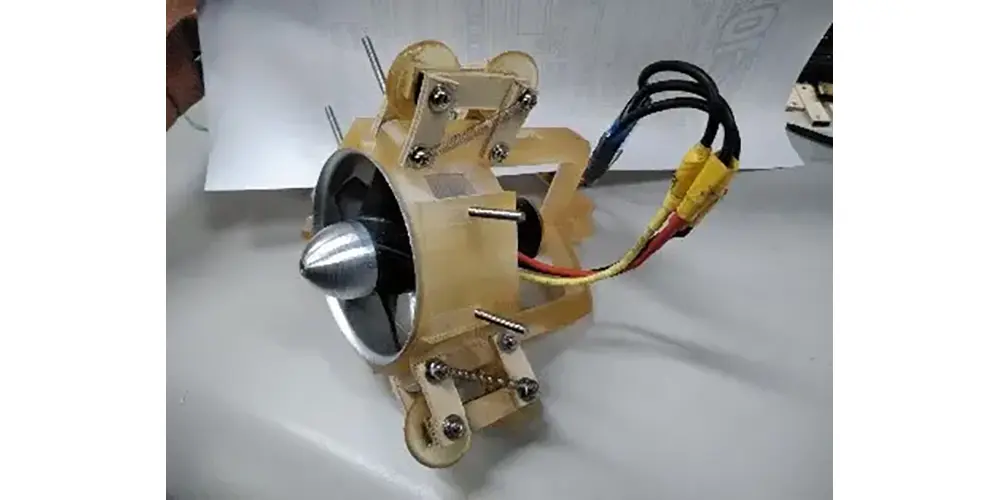
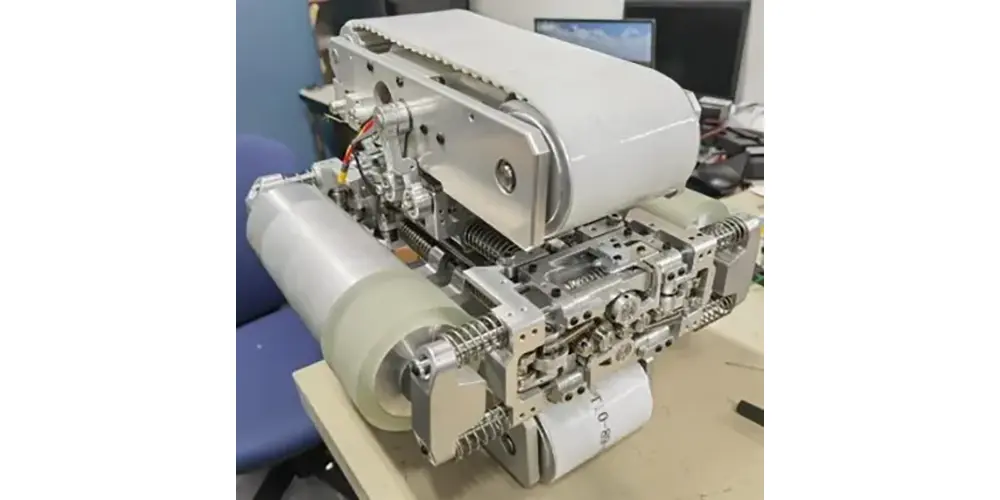
Development and Control of an Aerial Robot for Pipeline Maintenance
Research Overview
Aerial robots offer effective solutions for infrastructure maintenance in hazardous or hard-to-reach environments such as pipelines. This research presents the development and control of an unmanned aerial manipulator equipped with the necessary mechanisms and tools for use in pipeline maintenance. The system combines compact design with onboard sensing and localization, supported by detailed kinematic and dynamic modeling and robust control strategies to ensure precise trajectory tracking and stable force interaction. Validation through simulations and experimental trials highlights the potential of the system to be employed in infrastructure maintenance tasks.